Control method of unmanned aerial vehicle multilayer recursive convergence neural network controller
A control method and neural network technology, which are applied in the control field of multi-layer recursive convergent neural network controllers for unmanned aerial vehicles, can solve the problems that PID controllers are not suitable for tracking dynamic targets, have delays, and take a long time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
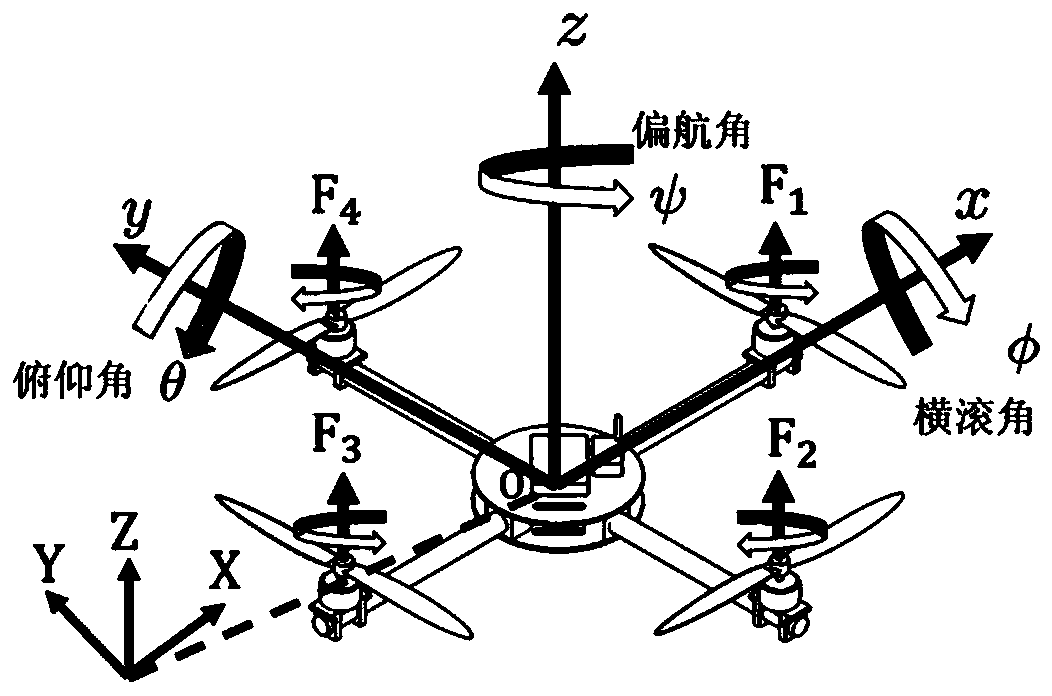
[0096] This embodiment provides a multi-layer recursive convergence neural network controller control method for an unmanned aerial vehicle. The unmanned aerial vehicle uses a quadrotor unmanned aerial vehicle. The control method specifically includes the following steps:
[0097] S1: Establish a UAV model and integrate the hysteresis effect of the motor into the UAV model;
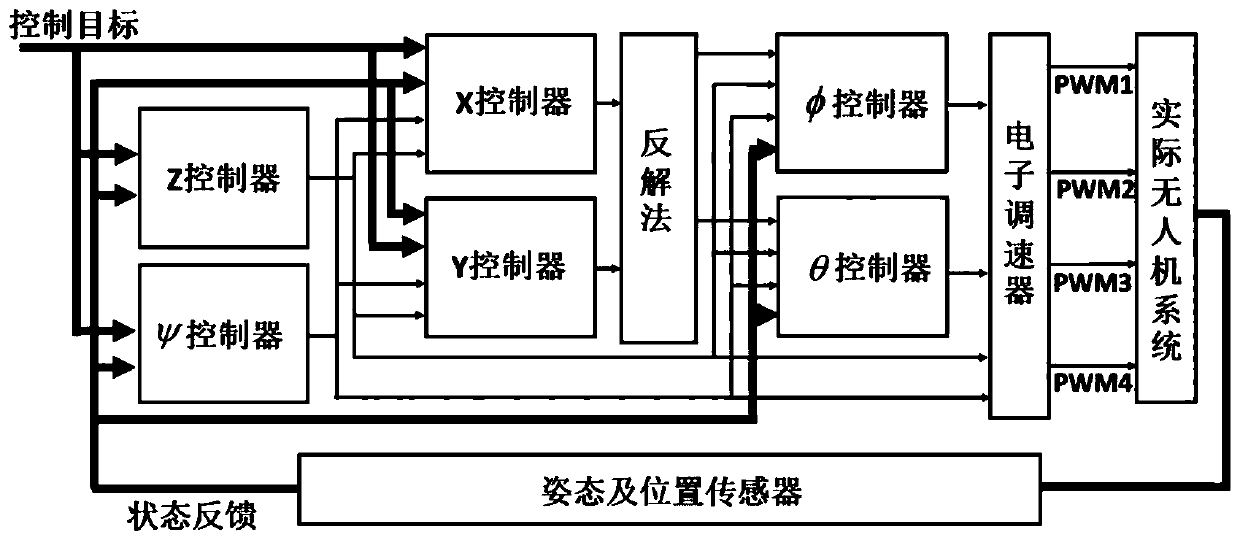
[0098] S2: Based on the UAV model in step S1, adopt the method of recursive convergence neural dynamics to design height Z controller, yaw angle ψ controller, roll angle φ controller, pitch angle θ controller, X controller, Y controller;
[0099] S3: Input the control target and the state information of the actual system obtained by the sensor carried by the UAV into the controller, and the controller calculates the control component;
[0100] S4: The control component in step S3 is converted and delivered to the aircraft motor governor to control the motion of the UAV.
[0101] Specifically, the UAV mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com