

Method for grabbing object through mobile manipulator on basis of GPS and binocular vision positioning
A mobile manipulator and binocular vision technology, applied in the field of automation, can solve the problems of small search range, low operation accuracy, fast positioning and accurate alignment to the target, etc., to achieve the effect of shortening the search time and improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
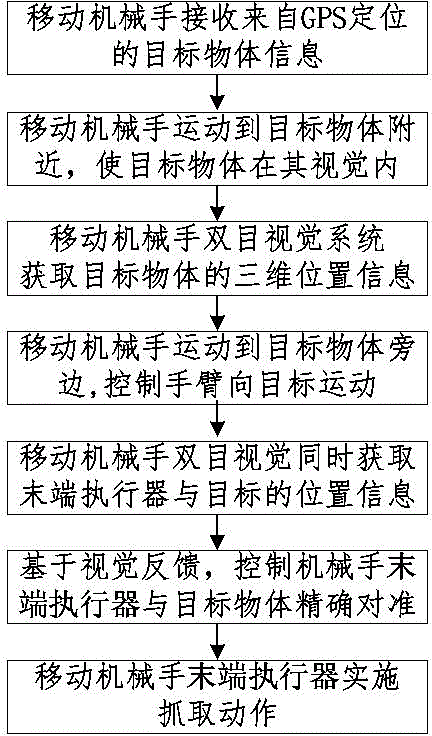
[0013] The invention discloses a mobile manipulator object grasping method based on GPS and vision positioning. The mobile manipulator moves to the vicinity of the target object according to the spatial position of the target object located by GPS, and controls the end effector of the manipulator to implement the grasping action based on the binocular vision.
[0014] Please refer to figure 1 , figure 1 It is a flow chart of a mobile manipulator object grasping method based on GPS and visual positioning provided by the present invention.
[0015] A mobile manipulator object grasping method based on GPS and visual positioning uses a GPS controller to obtain the spatial position information of the target object.
[0016] The mobile manipulator moves to the vicinity of the target object according to the spatial position information of the target object, so that the target object is within the binocular vision range of the mobile manipulator;
[0017] The mobile manipulator us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More