

Metamorphic parallel mechanism for ankle joint rehabilitation
An ankle joint, parallel technology, applied in the field of robotics, can solve the problems of single function, increase the weight of the ankle joint, increase the inertia, etc., to improve the training effect, simplify the control process, and speed up the recovery process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to detail the technical content, structural features, achieved goals and effects of the present invention, the following will be described in detail in conjunction with the accompanying drawings.
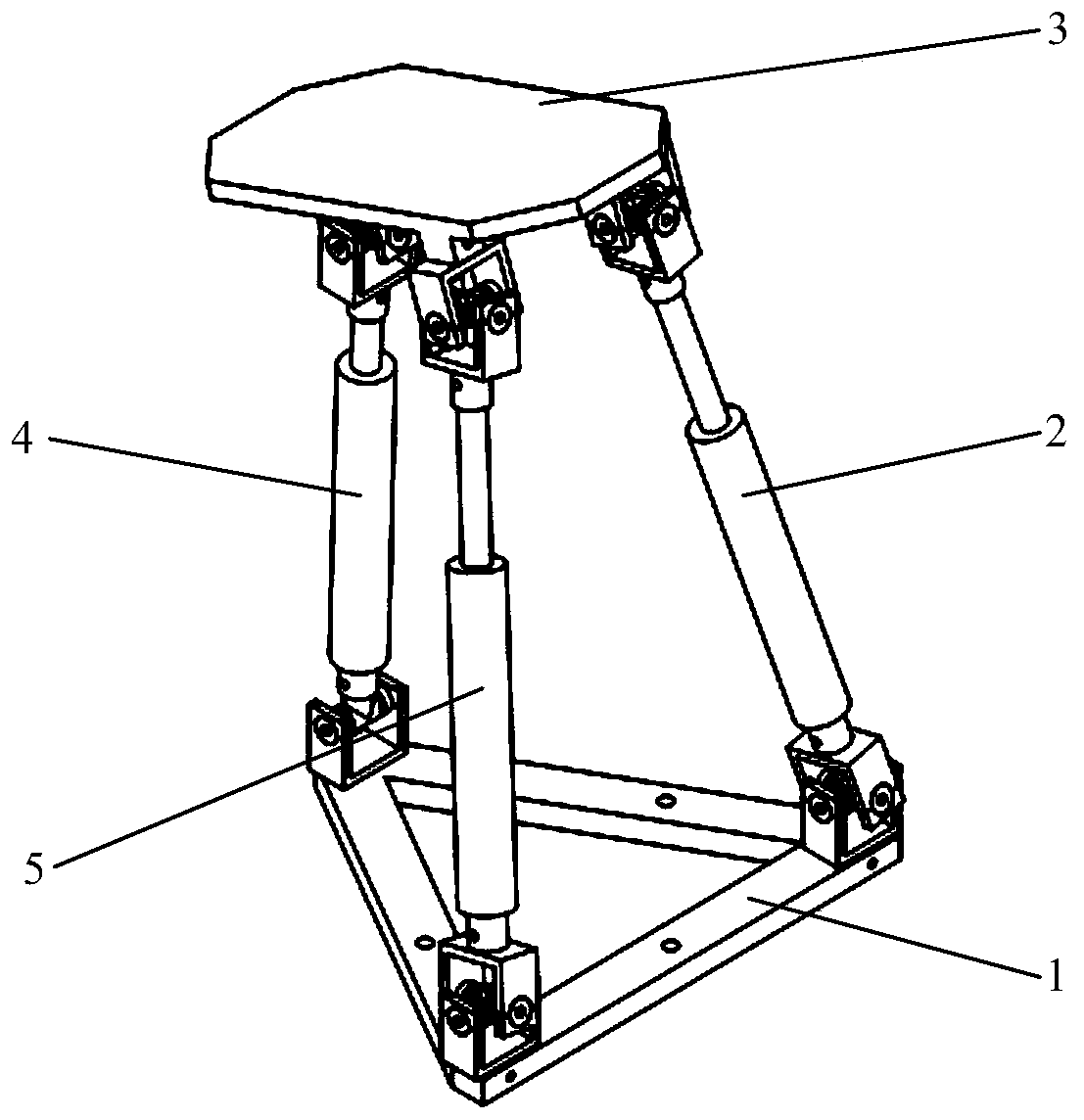
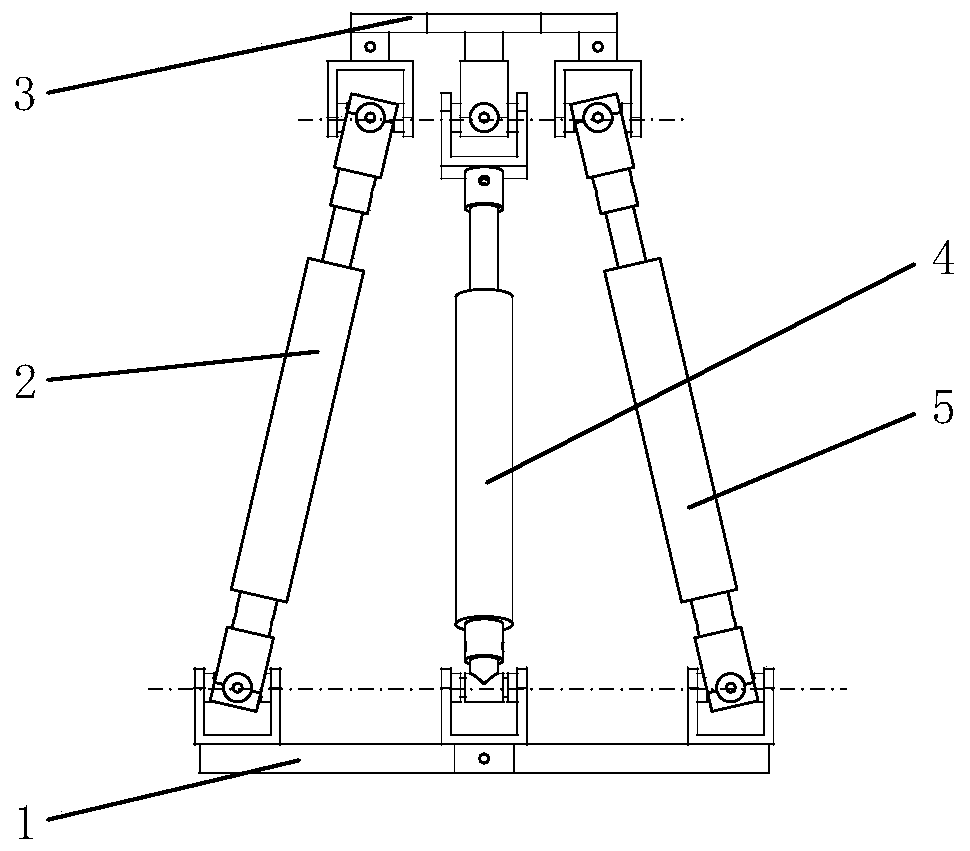
[0025] The invention provides a metamorphic parallel mechanism suitable for ankle joint rehabilitation, such as figure 1 As shown, it includes a fixed platform 1, a moving platform 3, a first branch chain 2, a second branch chain 5, a third branch chain 4 and a drive system.
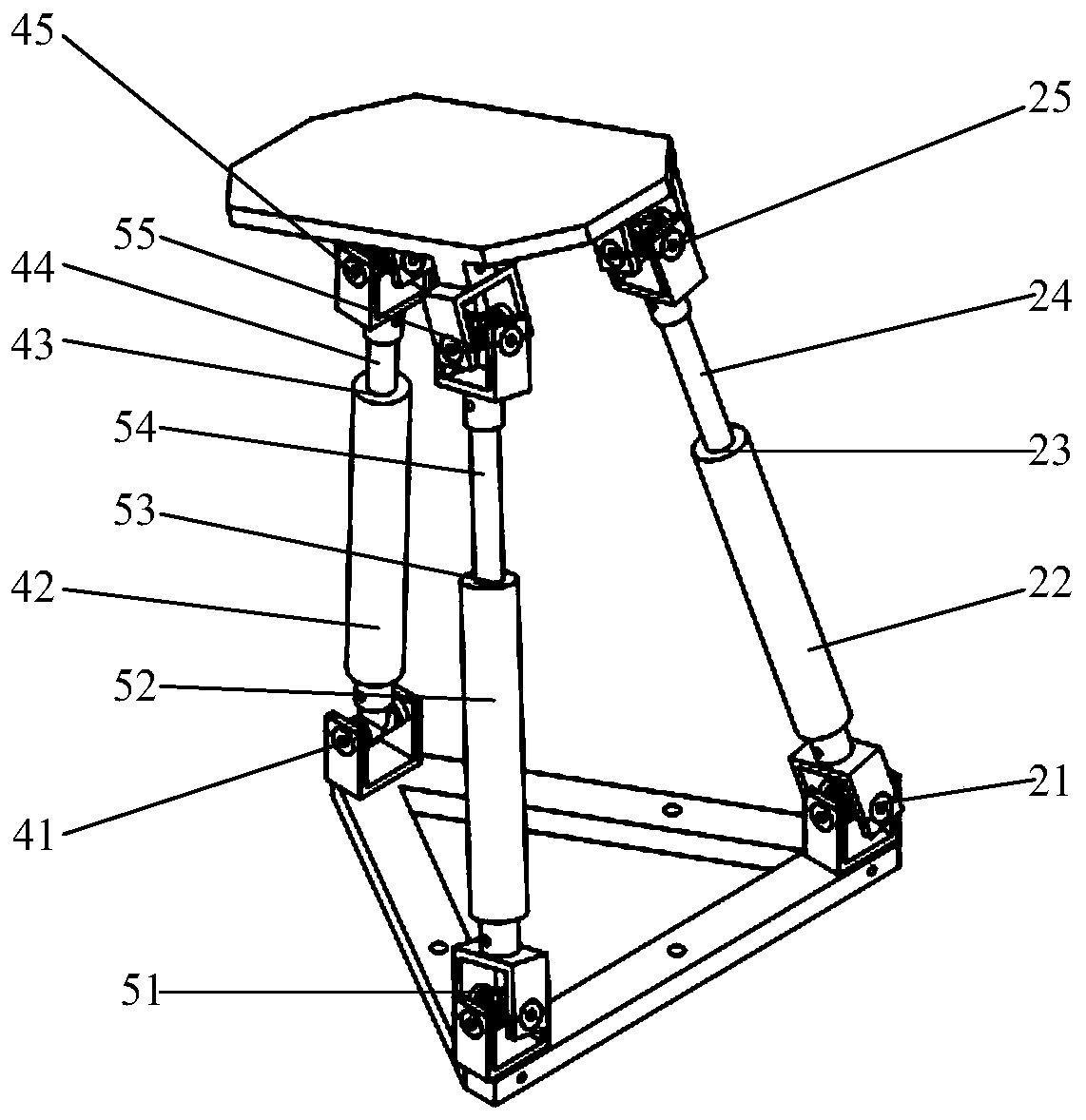
[0026] Such as figure 2As shown, the first branch chain 2 includes the first Hooke hinge 25, the first upper link 24, the first moving pair 23, the first lower link 22 and the second Hooke hinge 21, the first upper link 24 The first end is connected with the moving platform 3 through the first Hooke hinge 25, the second end of the first upper link 24 is connected with the first end of the first lower link 22 through the first moving pair 23, and the first lower link The second end of the rod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More