

Path planning method and device for autonomous vehicle, vehicle and storage medium
A technology for vehicle routing and automatic driving, applied in vehicle position/route/height control, measuring devices, road network navigators, etc., can solve problems such as high cost, poor portability, and low path accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, the drawings only show some but not all structures related to the present invention.
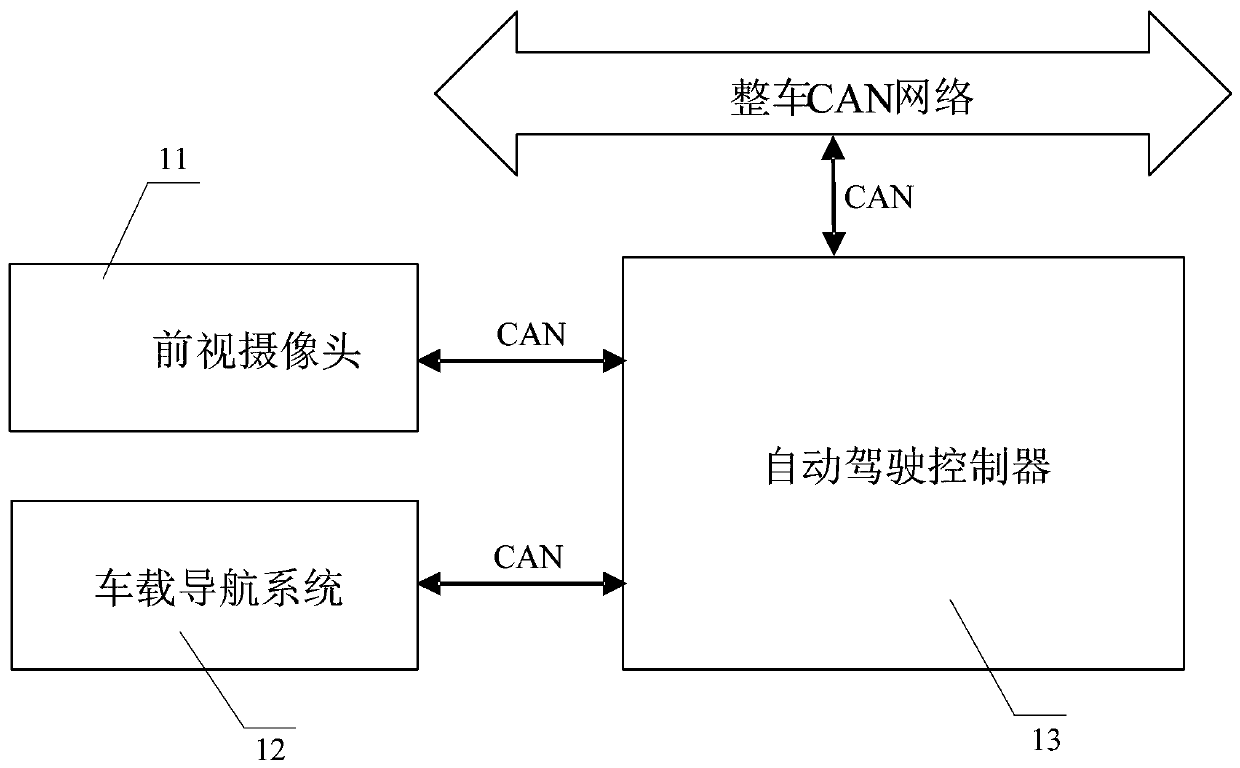
[0044] figure 1 The system architecture diagram of the path planning method for an autonomous driving vehicle provided by the present invention. like figure 1 As shown, the system of the automatic driving vehicle path planning method provided in this embodiment includes: a front-view camera 11 , a vehicle navigation system 12 and an automatic driving controller 13 . The front-view camera 11 and the in-vehicle navigation system 12 are both connected to the automatic driving controller 13 , which may be specifically connected thro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More