

Racing track cone bucket detection and target point tracking method based on multi-line laser radar
A technology of laser radar and multi-line laser, which is applied in the direction of radio wave measurement system, two-dimensional position/channel control, measurement device, etc., to achieve strong real-time performance, not easily affected by light conditions, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
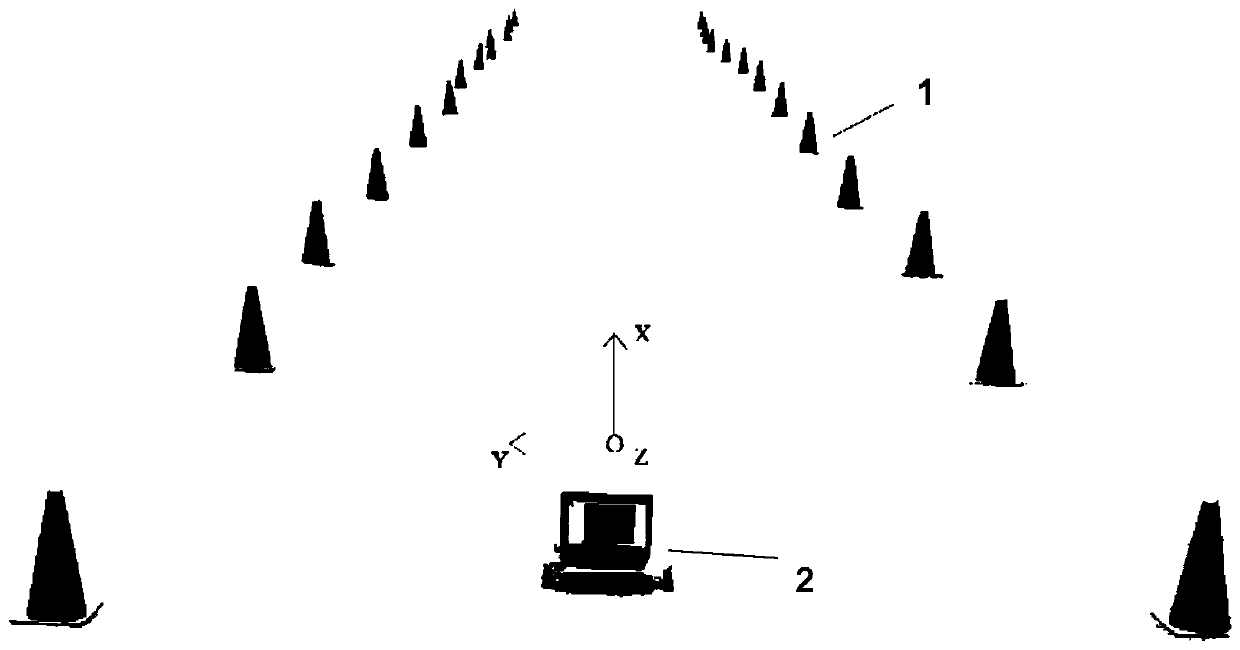
[0033] The purpose of the present invention will be further described in detail through specific examples below. In order to reduce costs and facilitate experimental testing, the present invention uses the experimental car to simulate the real application scene of the racing car, and uses the same installation position and installation height as the real car to simulate the laser radar The data collection method installed on the real racing car, the embodiment can not be repeated here one by one, but the embodiment of the present invention is not limited to the following embodiment.
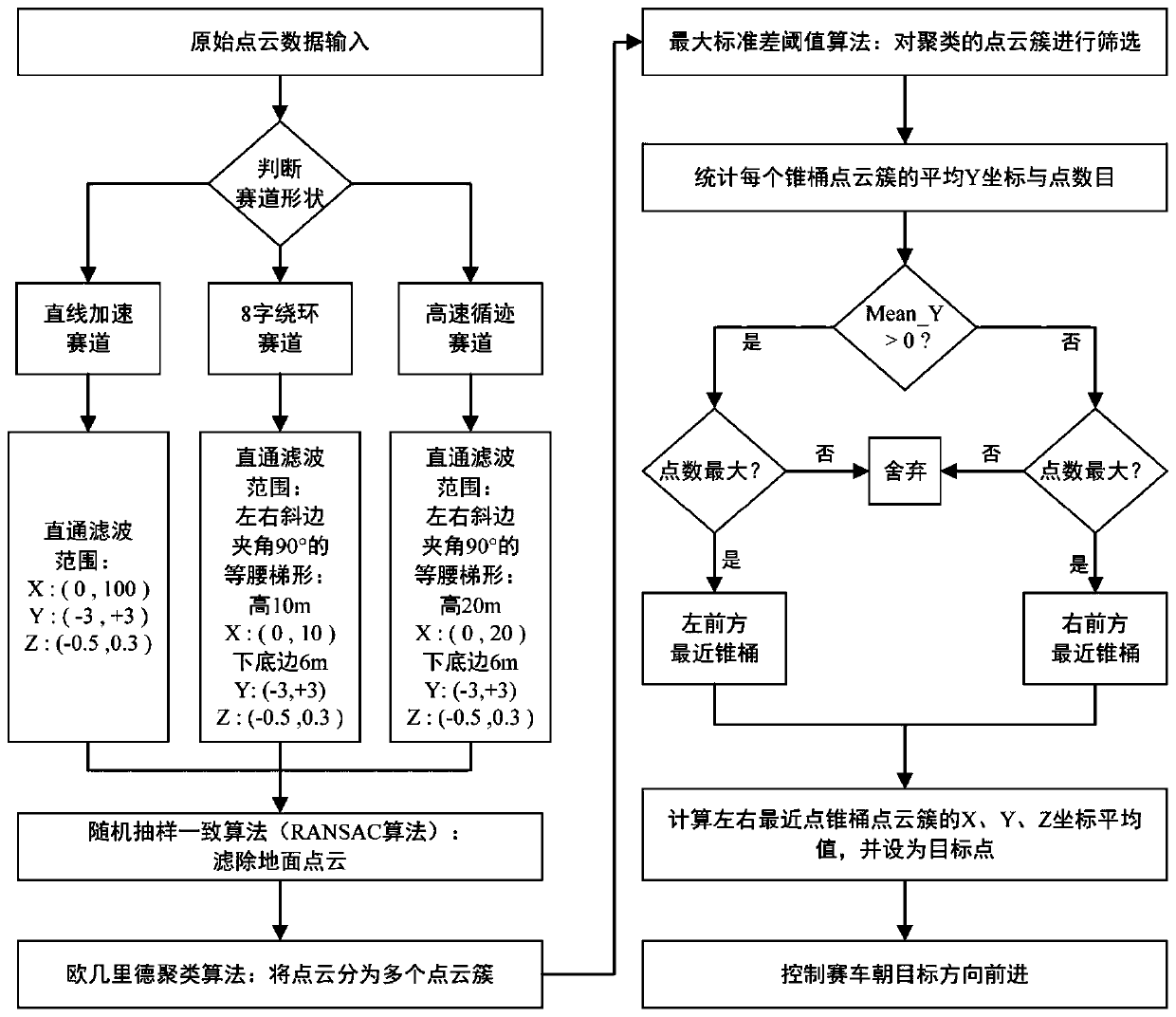
[0034] Such as figure 1 As shown, a racetrack cone detection and target point tracking method based on multi-line lidar includes the following steps:
[0035] 1. Read the lidar point cloud data under the ROS robot operating system; specifically, the described reading of the lidar point cloud data under the ROS robot operating system includes the steps: On the platform, install the ROS robot ope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More