Autonomous underwater robot propeller fault feature extraction method
An underwater robot, fault feature technology, applied in the direction of instruments, computer parts, character and pattern recognition, etc., can solve problems such as failure to extract fault features, affect the difference of fault feature values, and affect the effect of fault feature values, etc. Detects, mitigates the effects of random disturbances, and enhances the effect of fault signatures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
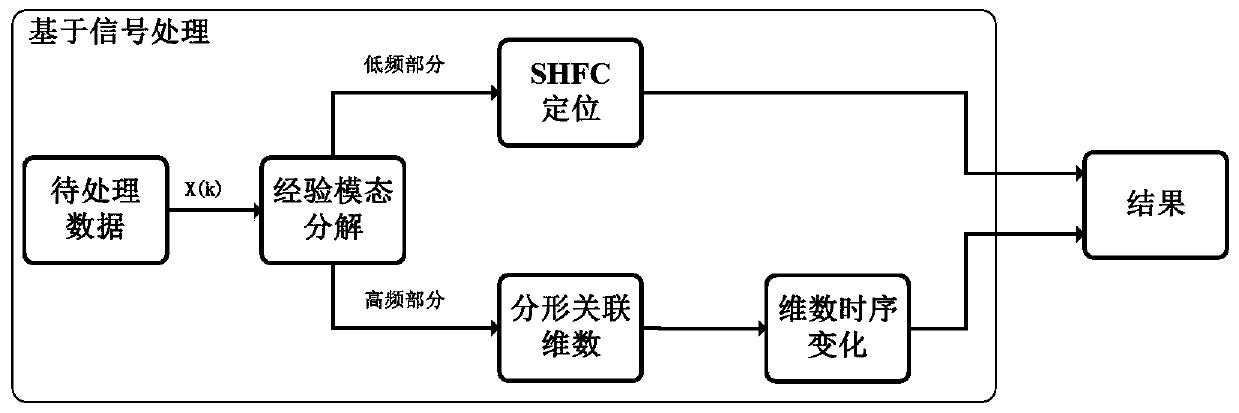
[0033] as attached figure 1 As shown, the fault feature extraction method of this patent is divided into three parts: preprocessing, high-mode partial fault feature extraction, and low-mode partial fault feature extraction. The basic implementation steps are as follows:
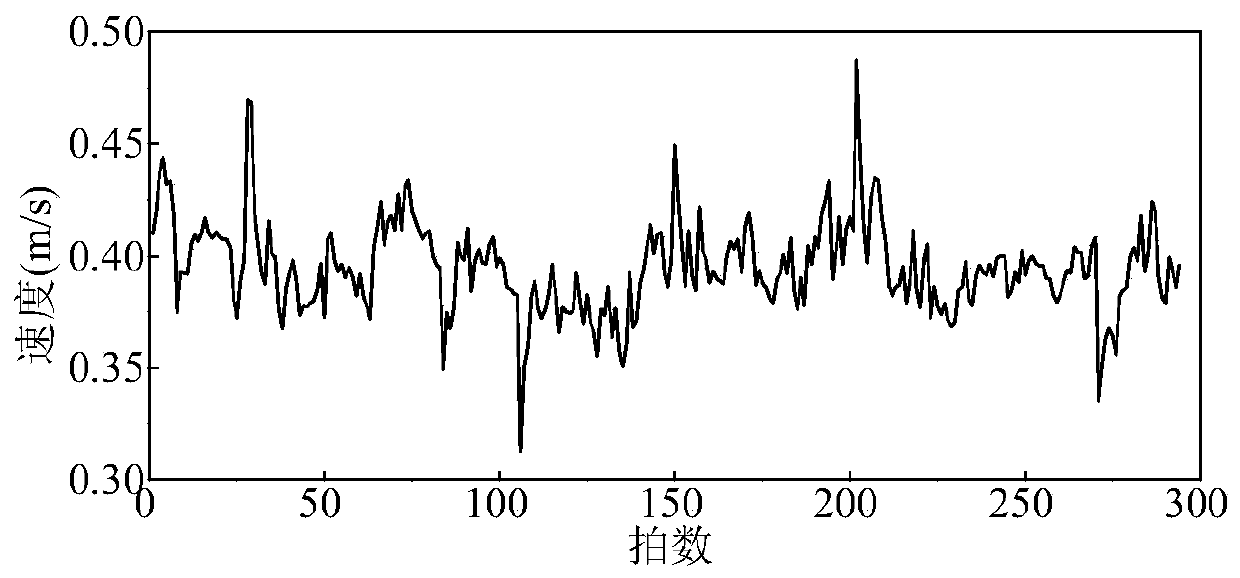
[0034] (1) Empirical mode decomposition
[0035] The empirical mode decomposition is performed on the speed state quantity data of AUV, and the original data is decomposed into different modes.
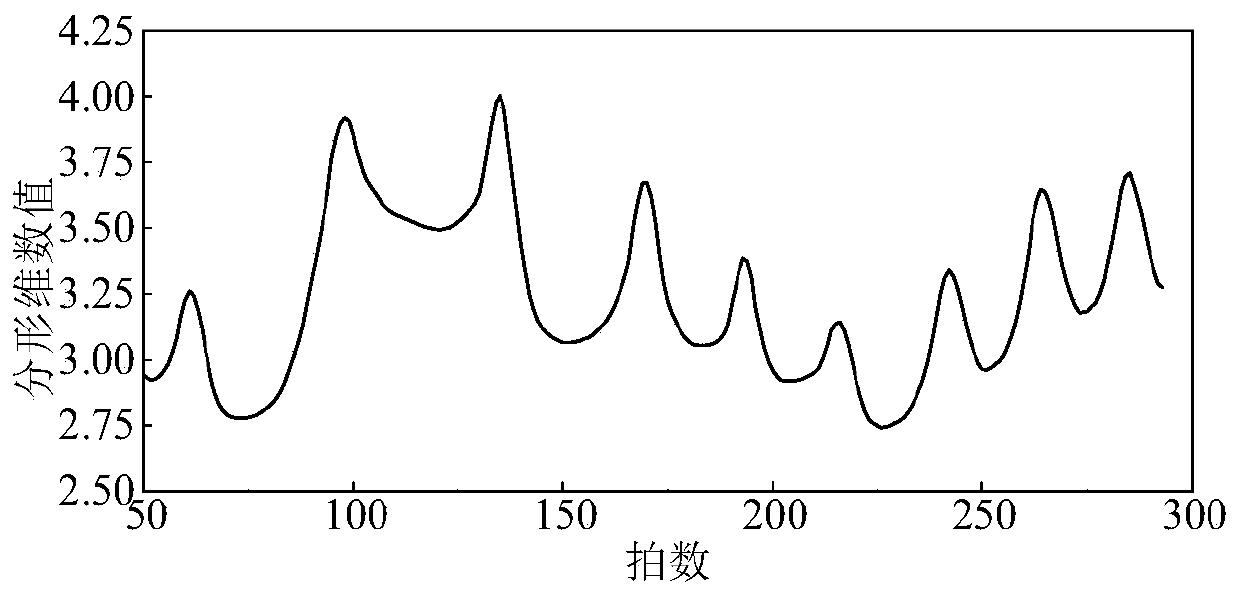
[0036] (2) Fractal Dimension Fault Feature Extraction
[0037] This patent adopts the time window fractal dimension algorithm to extract and screen the fault features of mode four and higher modes.
[0038] The specific implementation method of introducing the rolling time window into the fractal dimension is: calculate the fractal dimension fault characteristics of the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com