

Method and device for determining occupied position of train
A technology for occupying positions and trains, which is applied in the field of determining the occupied positions of trains, and can solve problems affecting train operation efficiency and the inability to extend the movement authorization of rear vehicles, so as to achieve the effects of improving train operation capacity, train operation efficiency, and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0056] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
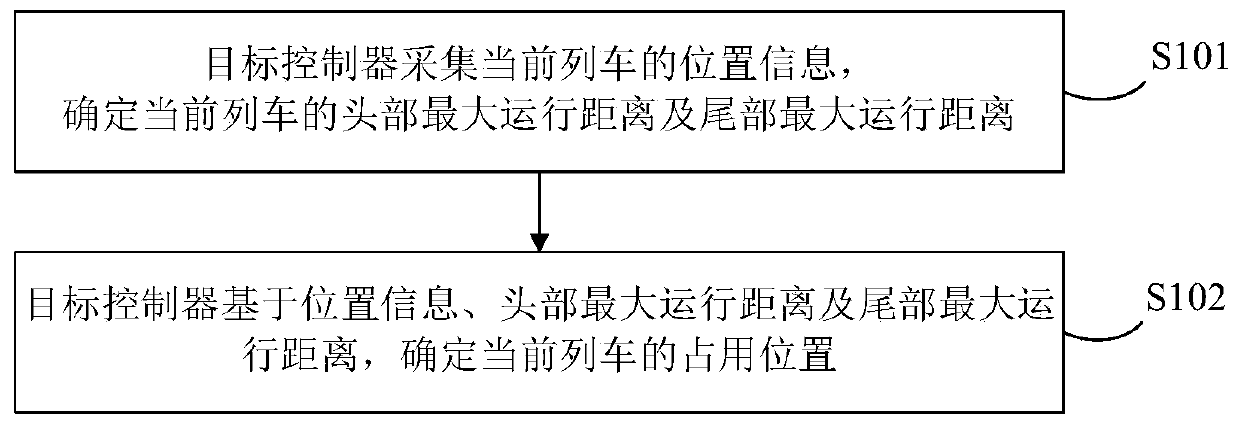
[0057] figure 1 It shows a schematic flowchart of a method for determining a train occupancy position provided by this embodiment, including:
[0058] S101. The target controller collects the position information of the current train, and determines the maximum running distance of the head and the maximum running distance of the tail of the current train.
[0059] Wherein, the target controller refers to a new type of regional controller constructed based on CI and ZC, for example, ZC and CI can be fused to construct a target controller.
[0060] The maximum running distance of the head refers to the maximum distance that the current train may run forward (ie, the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More