

Autonomous guidance and control method of unmanned aerial vehicle based on ddpg
A technology of guidance control and unmanned aerial vehicles, applied in the direction of control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as not having the ability to independently solve emergencies, affecting the efficiency of unmanned aerial vehicles, etc., to achieve Effects of enhancing autonomy and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
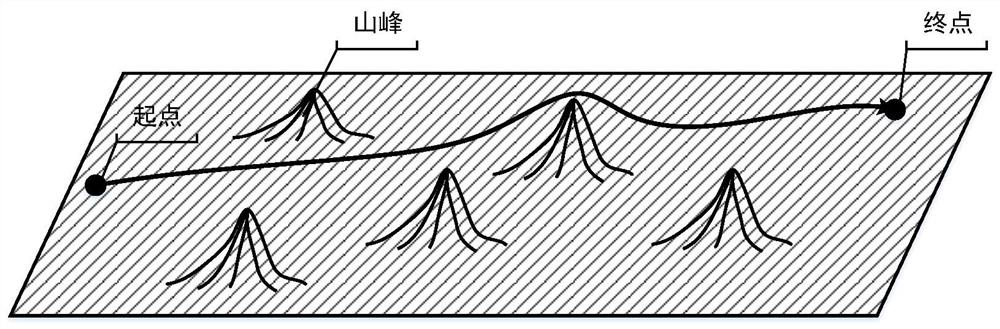
[0030]Based on artificial intelligence technology, the present invention proposes a DDPG-based UAV autonomous guidance control method. The method conducts training and learning in a pre-established task environment, generates UAV control quantities based on environmental feedback, and then guides and controls the UAV. flight maneuvers. This method can improve the autonomous guided flight capability of the UAV, and can fly from the starting point to the ending point safely and quickly.
[0031] The implementation process of the present invention includes the following steps:
[0032] 1. Establish a three-degree-of-freedom motion model of the UAV.
[0033]
[0034] In the formula, N x is the tangential overload of the UAV in the aircraft coordinate system, N y is the normal overload in the aircraft coordinate system, v is the speed of the UAV, θ is the inclination angle of the UAV track, ψ c is the UAV track deflection angle, γ c is the velocity inclination angle, x, y a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More