

Obstacle encountering treatment method for fire-fighting robot
A technology of fire-fighting robot and processing method, which is applied in the direction of manipulators, program-controlled manipulators, fire rescue, etc., which can solve the problems of difficulty in manufacturing, high cost, and less research, so as to reduce maintenance frequency, use cost, and damage rate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
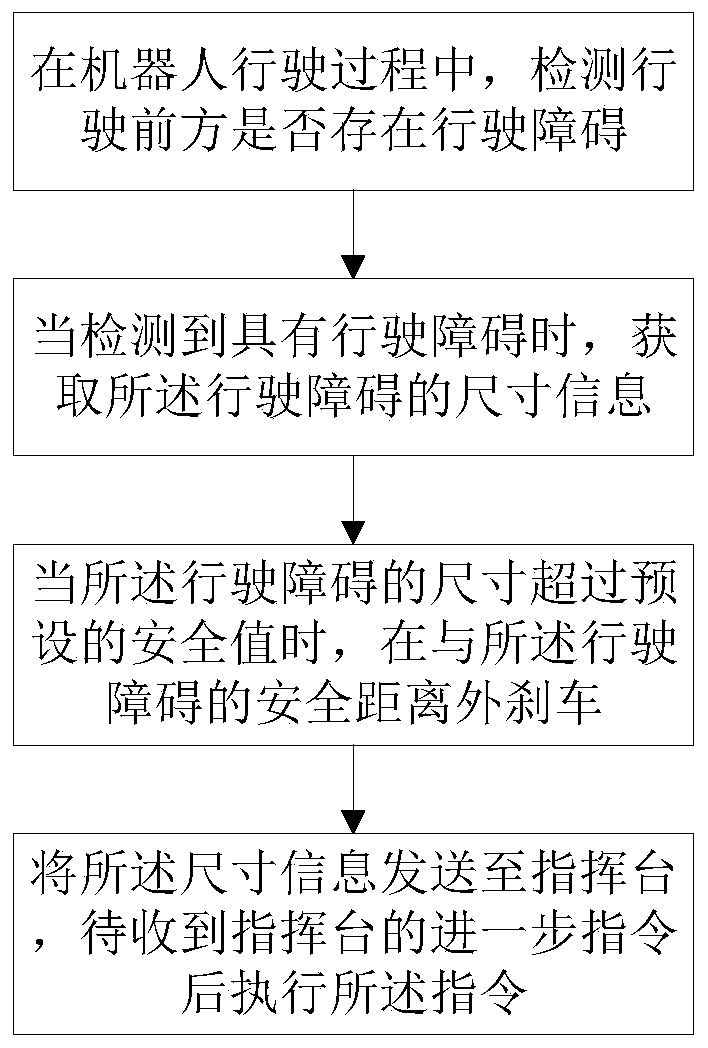
[0026] Such as figure 1 Shown is an obstacle handling method for a fire-fighting robot according to Embodiment 1 of the present invention, which includes the following steps:
[0027] Driving obstacle detection: During the automatic driving of the robot, detect whether there is a driving obstacle in front of the robot, and obtain the size information of the driving obstacle when a driving obstacle is detected;
[0028] Response to driving obstacles: When the size of the driving obstacle exceeds the preset safety value, brake at a safe distance from the driving obstacle, and send the size information to the command platform, and the next step is to be received by the command platform The action corresponding to the instruction is executed after the instruction of the action.
[0029] The instructions of the podium can be made according to the actual situation, such as one or any combination of the following instructions: re-planning the route, using manual control to control t...
Embodiment 2
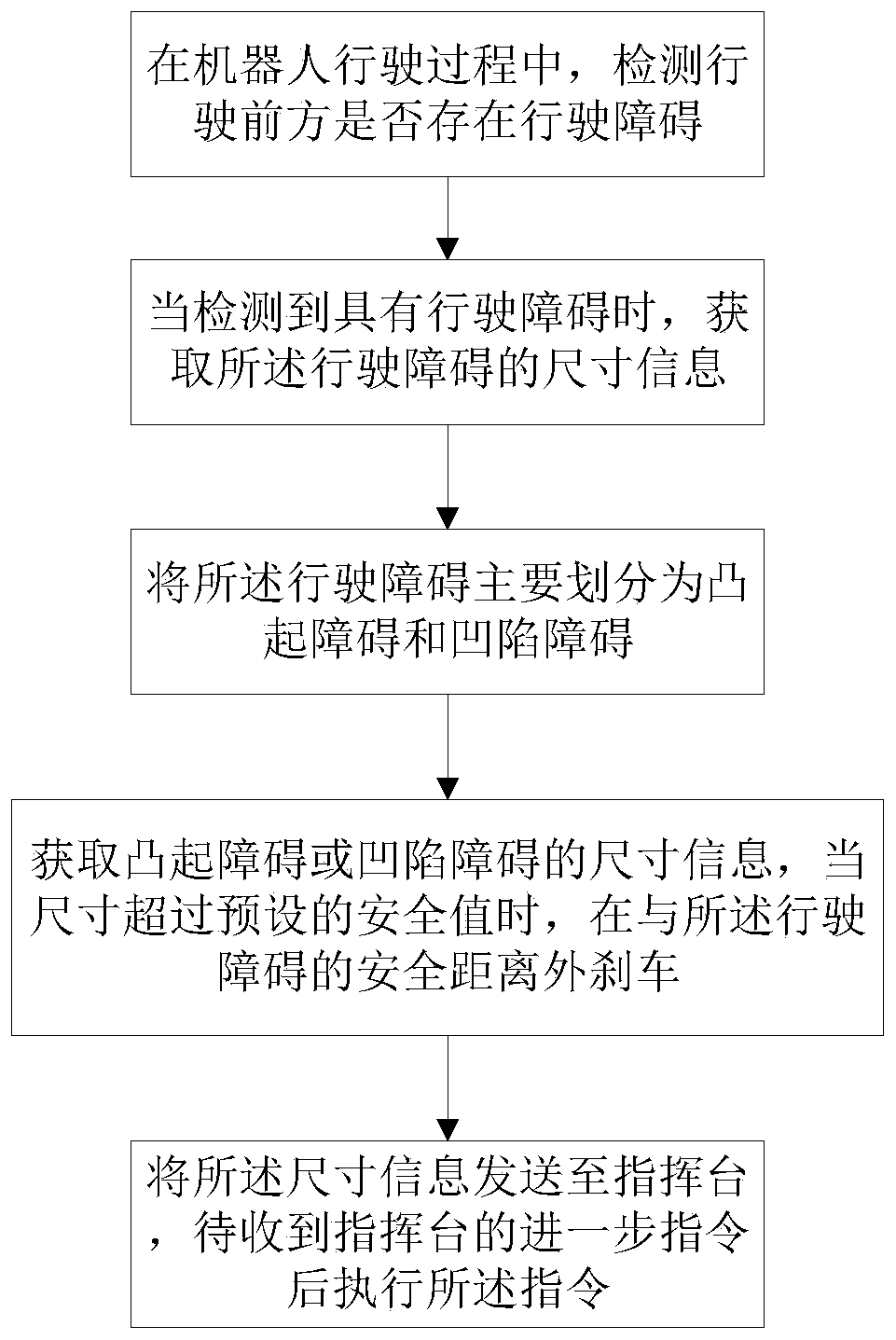
[0034] exist figure 2 Shown in the present invention is a flow chart of the second embodiment of the obstacle handling method of a fire-fighting robot, which is further refined on the basis of Embodiment 1, and obstacles are divided into types and dealt with respectively, which includes the following step:
[0035] Driving obstacle detection: During the automatic driving process of the robot, it is detected whether there is a driving obstacle in front of the robot, and when there is a driving obstacle detected, the size information of the driving obstacle is obtained.
[0036] Classification of driving obstacles: the driving obstacles are mainly divided into raised obstacles and sunken obstacles, the raised obstacles are obstacles higher than the road the robot is driving on, and the sunken obstacles are obstacles lower than the road the robot is driving on;
[0037] Dealing with driving obstacles:
[0038] When the driving obstacle is a raised obstacle, obtain the height o...
Embodiment 3
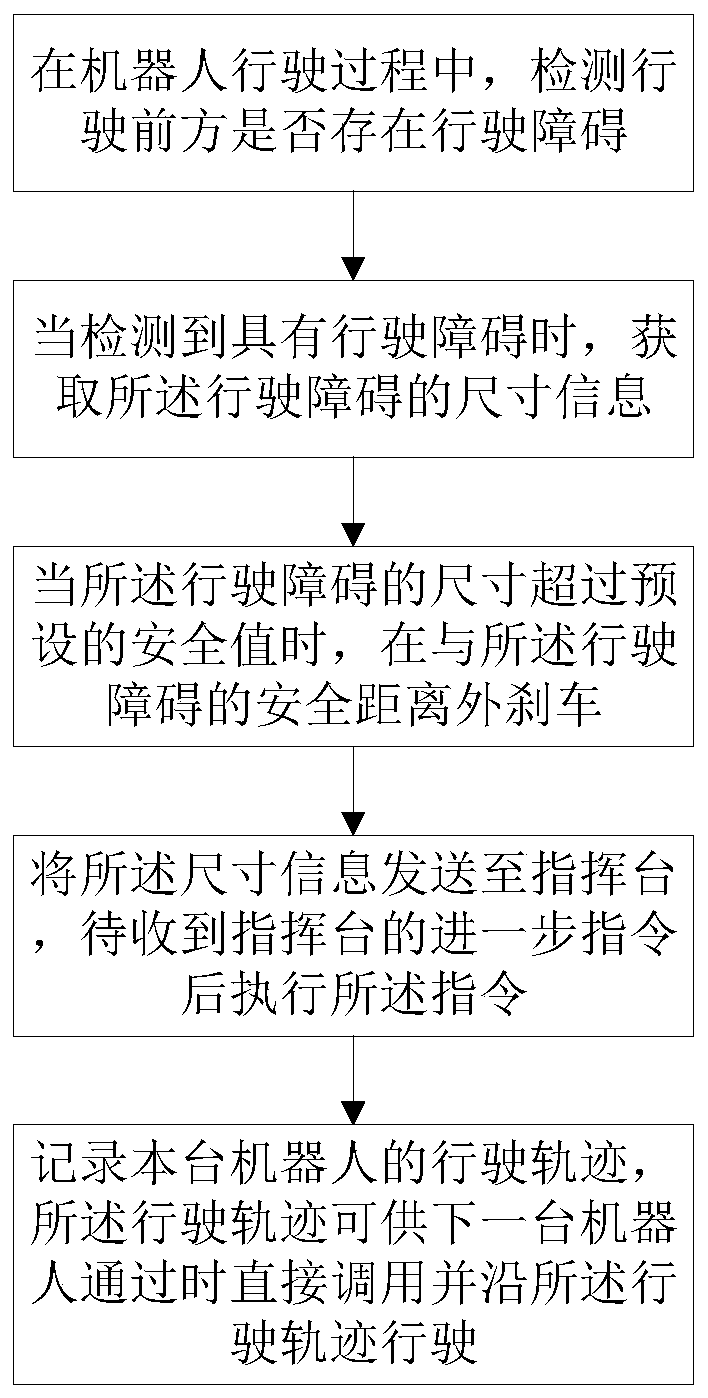
[0049] Such as image 3 It is a flow chart of the method of the second embodiment of the method for handling an obstacle of a fire-fighting robot in Embodiment 3 of the present invention, including the following steps:
[0050] Driving obstacle detection: During the automatic driving of the robot, detect whether there is a driving obstacle in front of the robot, and obtain the size information of the driving obstacle when a driving obstacle is detected;
[0051] Response to driving obstacles: When the size of the driving obstacle exceeds the preset safety value, brake at a safe distance from the driving obstacle, and send the size information to the command platform, and the next step is to be received by the command platform Execute the action corresponding to the instruction after the instruction of the action;
[0052] Record the driving trajectory of the robot, which can be called directly when the next robot passes by and travels along the driving trajectory.
[0053] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More