

Driving, sensing and pipeline structure integrated leg of hydraulic driving foot type robot
A technology for driving feet and robots, which is applied in the direction of fluid pressure actuators, motor vehicles, mechanical equipment, etc. It can solve problems such as cylinder rod bending, pipeline extrusion, and foot force increase, so as to reduce its own weight, solve leakage and Tubing extrusion, effect of reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
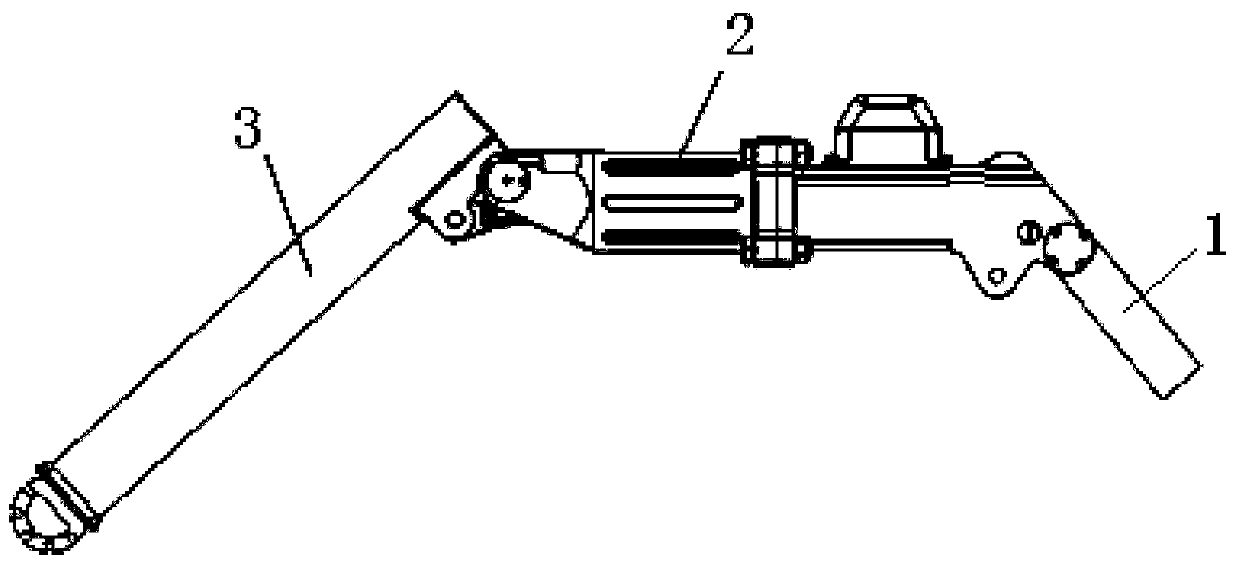
[0024] Such as figure 1 As shown, the present invention is oriented to the hydraulically driven legged robot with integrated legs for driving, sensing, piping, and structure, including a thigh rod 1, a housing 2 and a calf rod 3, and the thigh rod 1 and the housing 2 pass through the thigh The joint 10 is hinged, and the shell 2 and the calf rod 3 are hinged through the calf joint 4 .
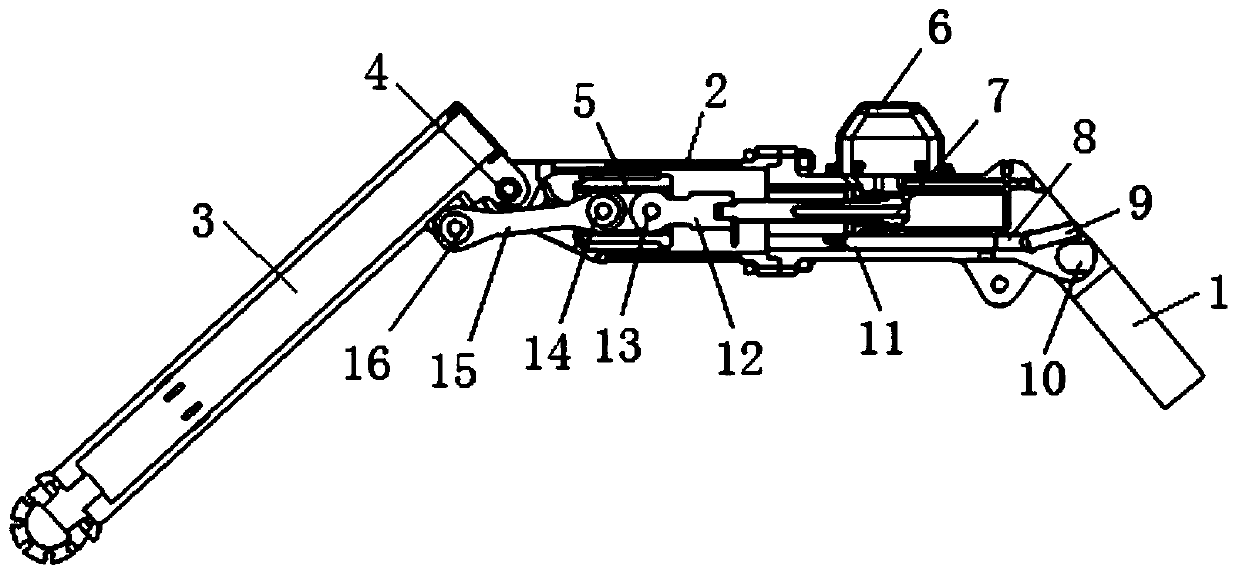
[0025] Such as figure 2 As shown, the mechanical leg housing 2 is provided with a graphite sliding sleeve 5 , the sliding sleeve 5 is slidingly connected to the mechanical leg housing 2 , and the sliding sleeve 5 can slide in the mechanical leg housing 2 . A hydraulic cylinder 7 is installed in the mechanical leg housing 2, the cylinder rod of the hydraulic cylinder 7 is connected to the force sensor 12, and the force sensor 12 is hinged to one end of the sliding sleeve 5 through the first hinge shaft 13, and the first hinge shaft 13 and the sliding sleeve 5 are Fixed connection. Metal conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More