

Self-adaptive landing gear for multi-rotor unmanned aerial vehicle
A multi-rotor UAV and landing device technology, which is applied in the direction of the chassis, can solve the problems of landing stability and reliability limitations, and achieve the effects of ensuring stability, saving power, and avoiding the tilt of the fuselage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation manner of the present invention will be described in detail in conjunction with the summary of the invention and the accompanying drawings.
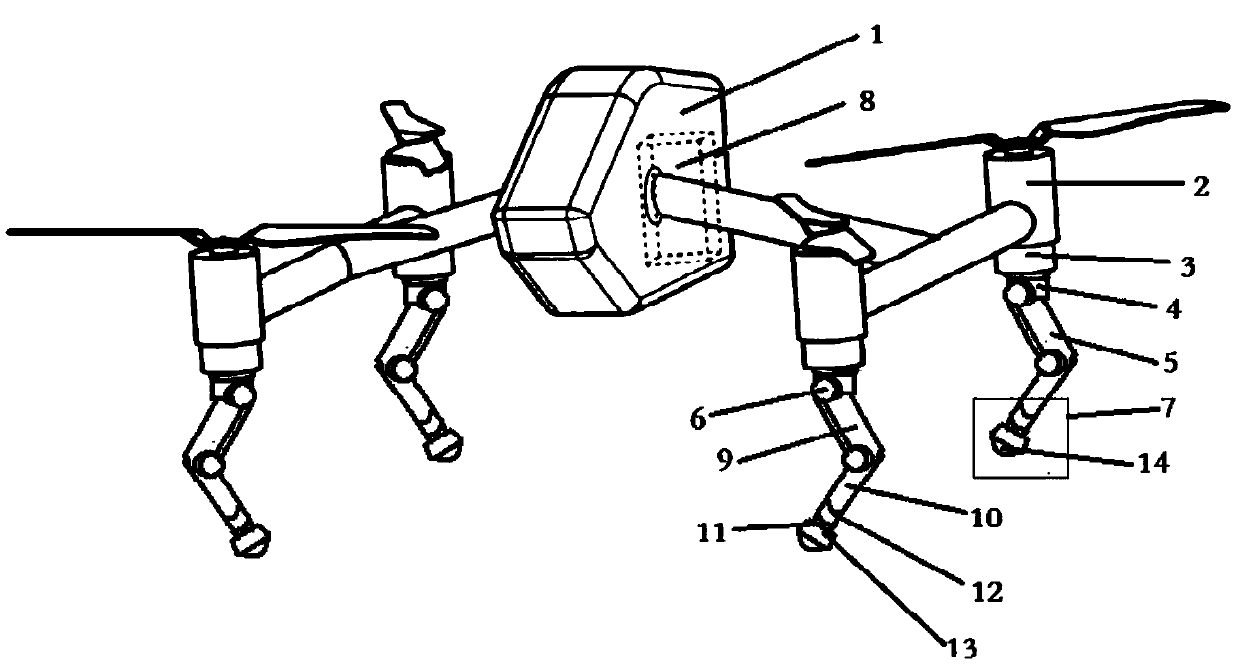
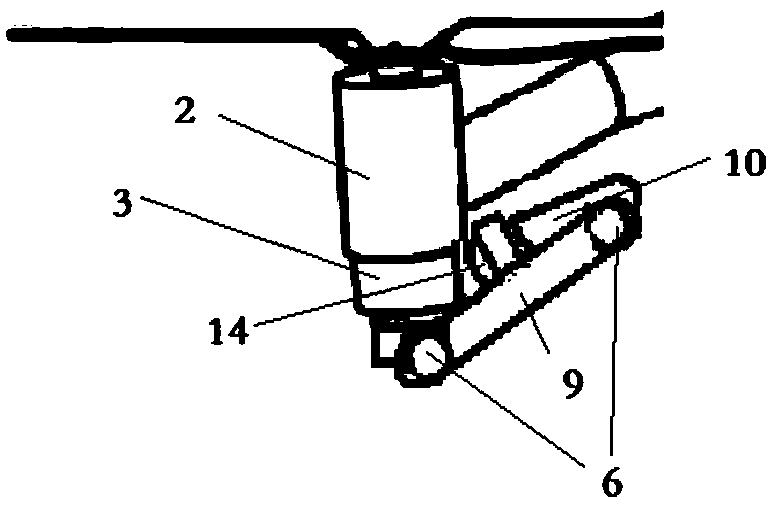
[0026] Referring to the accompanying drawings, the adaptive landing device is installed under the rotor steering gear cover 3 of the multi-rotor UAV, and installed through a special installation frame 4 . Each leg includes a mechanical link 5 , a joint driving device 6 and a buffer foot 7 , and its control system 8 is integrated and installed on the fuselage 1 .
[0027] The mechanical connecting rod 5 is made of high-strength aluminum alloy, and is divided into a femoral joint 9 and a tibial joint 10 , both of which are hollow cylindrical structures, so as to facilitate the wiring of the force sensor 12 . A joint driving device 6 is connected between the femoral joint 9 and the installation frame 4, between the femoral joint 9 and the tibial joint 10, and the joint driving device 6 is fixed on the mech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More