

A Visual Tracking and Localization Method Based on Dense Point Cloud and Synthetic View
A technology of visual tracking and positioning method, which is applied in the field of information to achieve the effect of rapid initialization and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
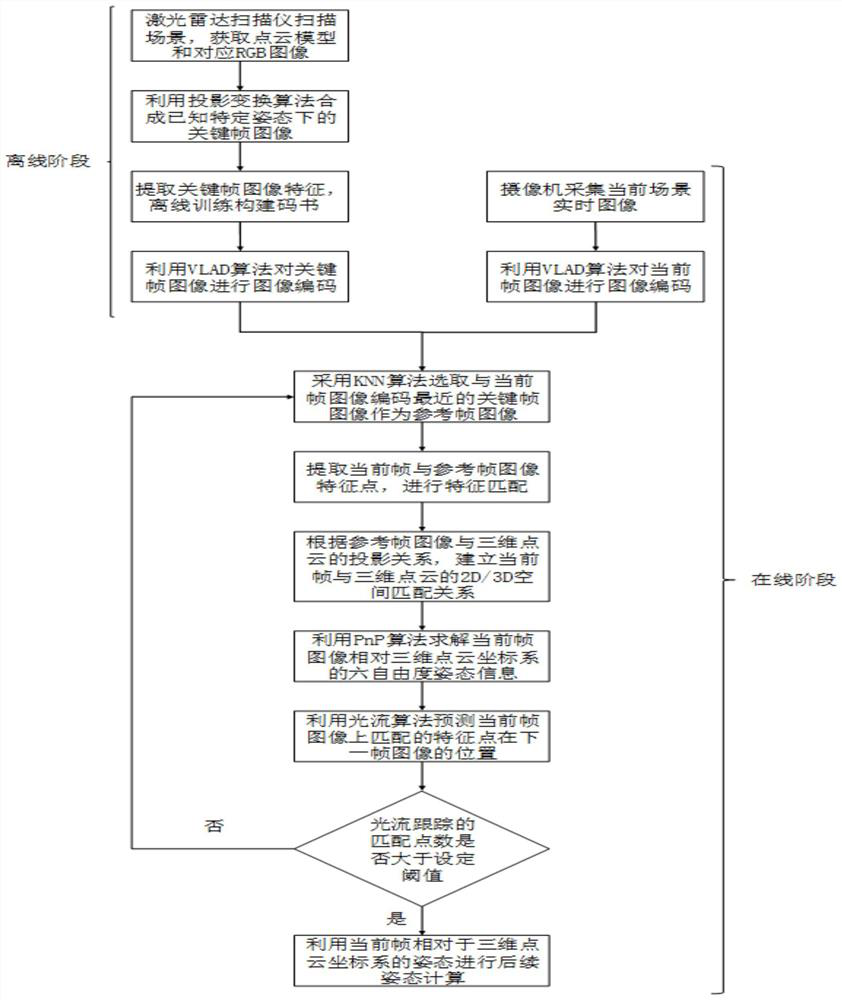
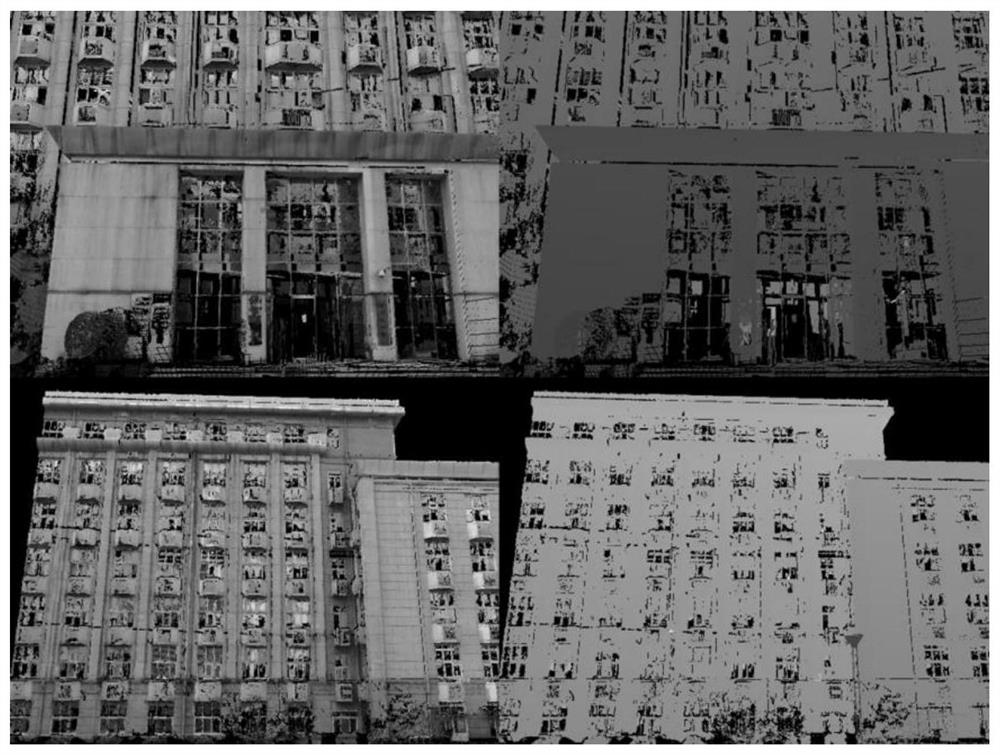
[0025] The design idea of the present invention is: transform the three-dimensional point cloud obtained by the laser radar through space back projection to generate a synthetic image under a known viewpoint, and use the method of matching the synthetic image with the real-time image acquired by the camera to estimate the real-time 6 freedom of the camera. degree pose. This method can be used for tracking navigation or auxiliary positioning in the fields of robots, unmanned vehicles, unmanned aerial vehicles, virtual reality and augmented reality.
[0026] The present invention is based on the visual tracking and positioning method of dense point cloud and s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More