

Robot man-machine interaction method taking semantic recognition as main mode and other modes as auxiliary modes
A semantic recognition and human-computer interaction technology, applied in the field of human-computer interaction systems, can solve the problems that fine movements cannot be accurately captured, affect user satisfaction, and are not suitable for human-computer interaction needs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
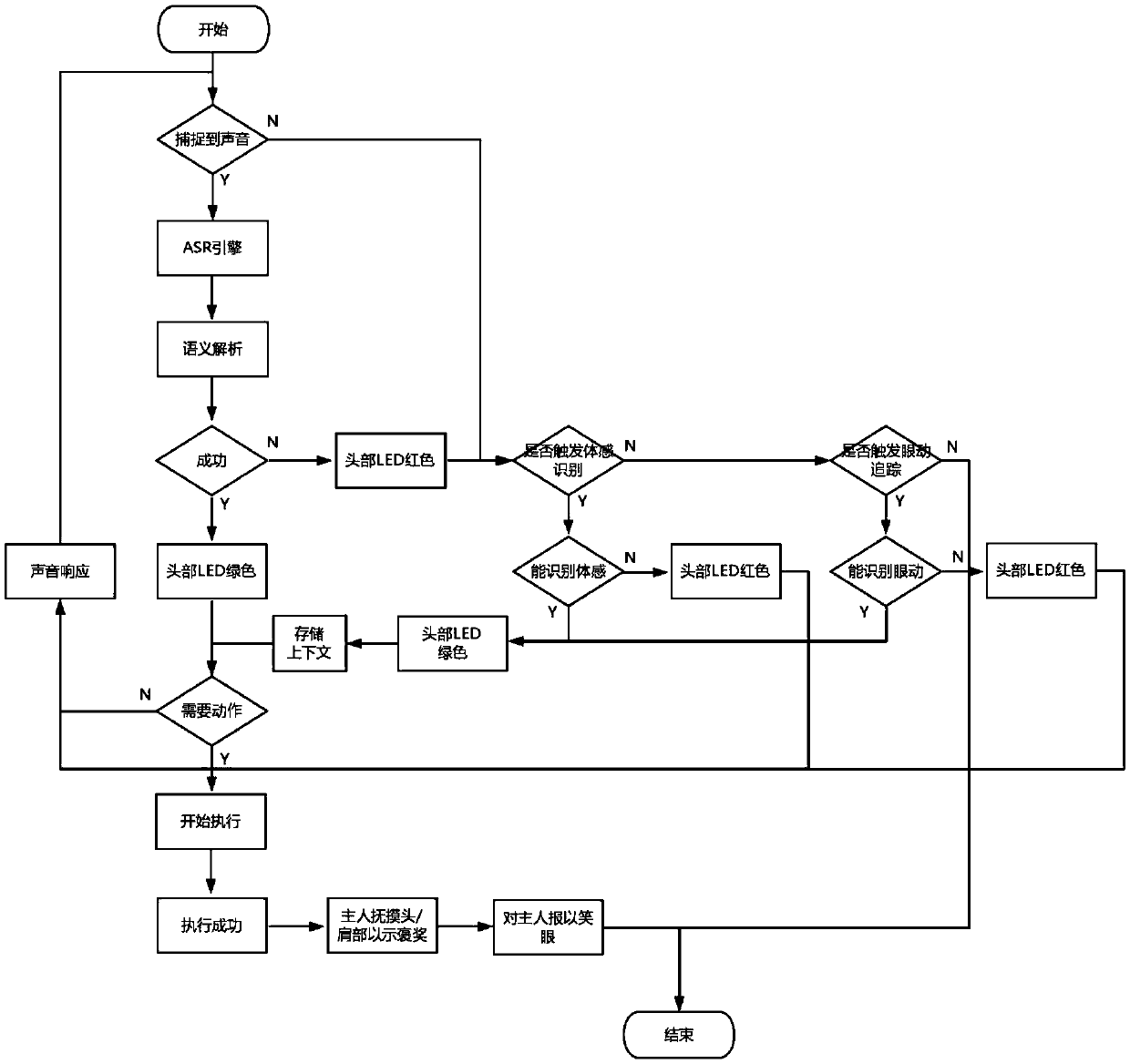
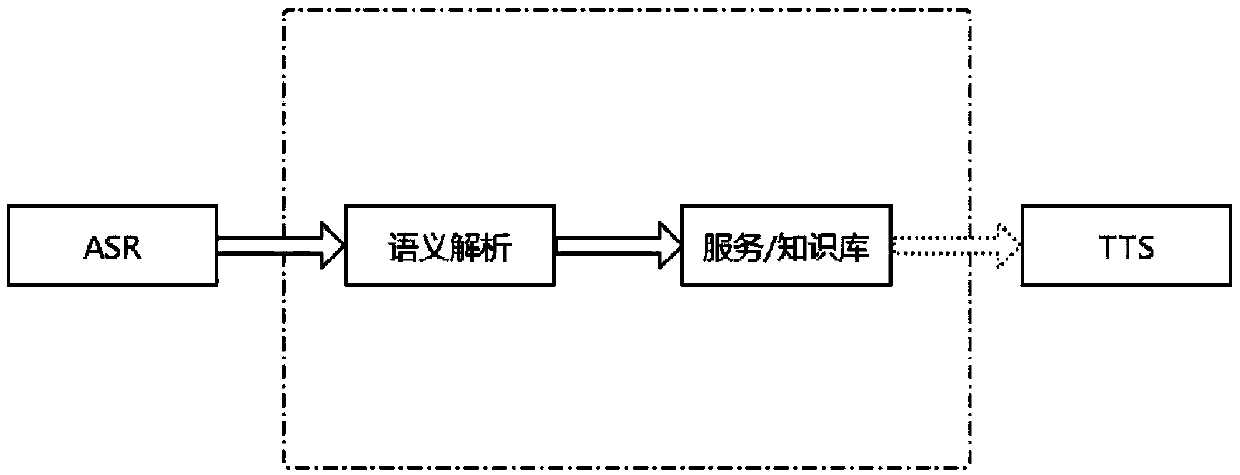
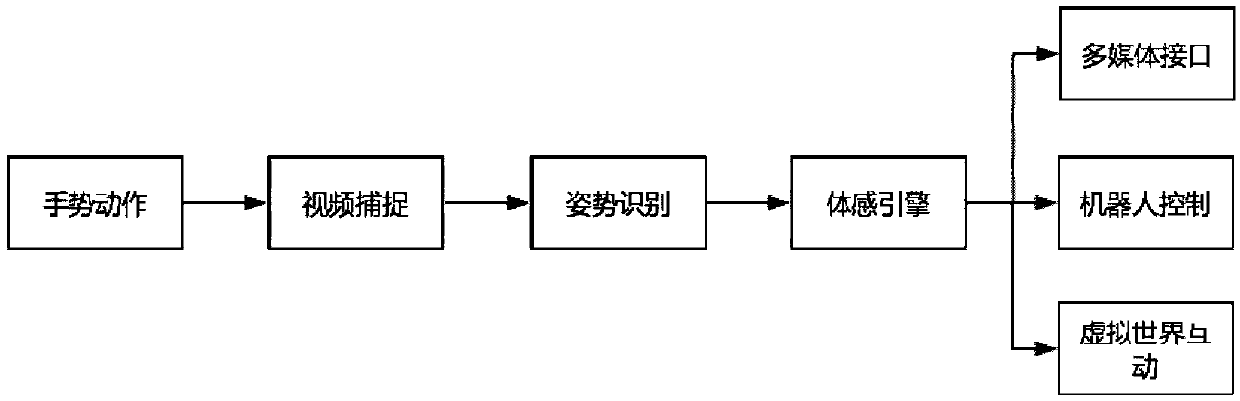
[0037] The robot human-computer interaction method mainly based on semantic recognition and supplemented by other methods is characterized in that the method is implemented through five modules: semantic recognition module, sensitive skin, touch screen, somatosensory interaction module and eye tracking module;
[0038] In this method, a total of 5 human-computer interaction methods are provided, and human-computer interaction is conducted through multiple methods such as text, voice, vision, motion, sensitive skin, environment, etc., fully simulating the interaction between humans, each way It is also defined as a module, namely the semantic recognition module, the sensitive skin module, the eye tracking module, the somatosensory module, and the touch screen module of the touch screen; these five methods can be used as a human-computer interaction medium alone or can be integrated; This interactive method is more in line with the morphological characteristics and user expectations...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More