

Unmanned surface vehicle tracking error constraint control method under random disturbance
A tracking error, random interference technology, applied in two-dimensional position/channel control, adaptive control, general control system and other directions, can solve problems such as loss, unmanned boat collision with reef ships, unmanned boat unsafe and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
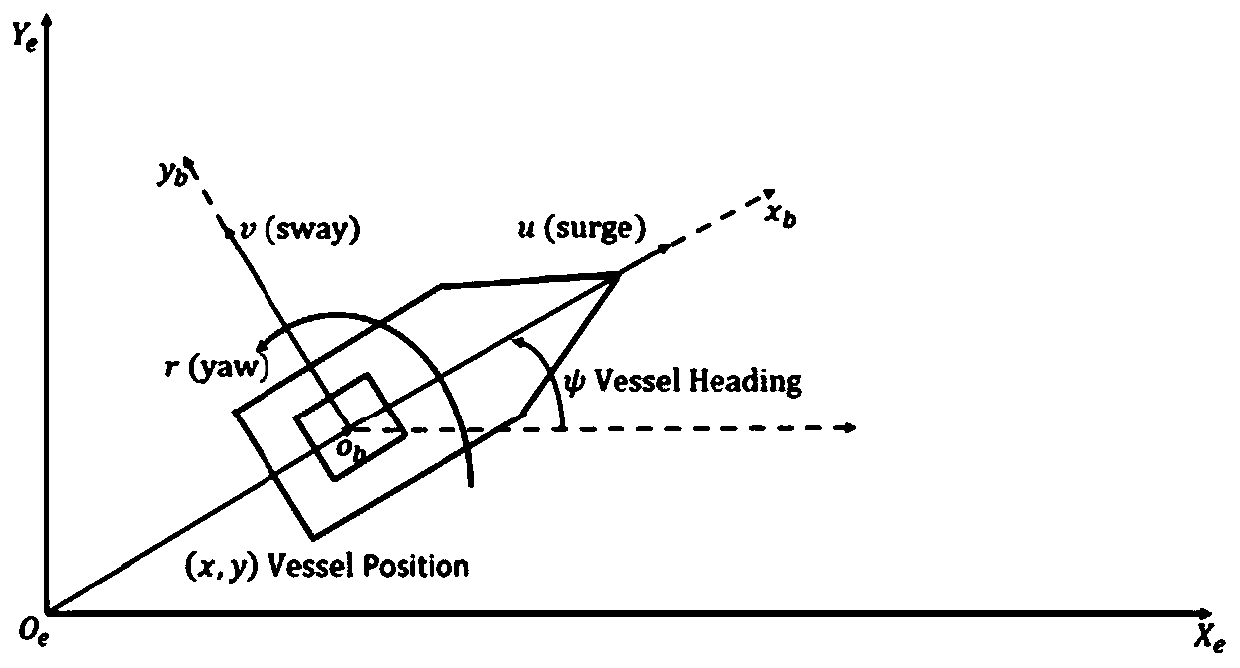
[0106] This embodiment mainly describes the tracking error constrained control of the unmanned ship under random interference. figure 1 It is a structural schematic diagram of the unmanned boat in the working area of this embodiment.
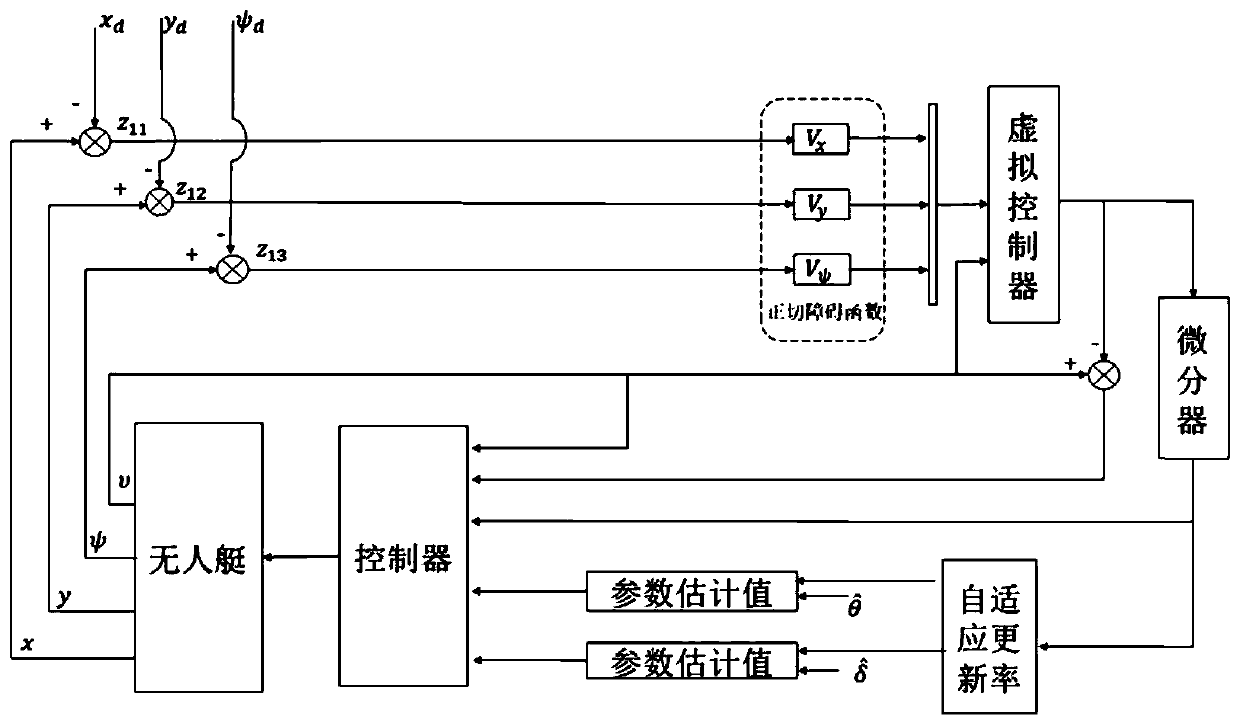
[0107] Such as figure 2 As shown, the unmanned vehicle tracking error constraint control method under random interference in this embodiment, its detailed implementation process includes:
[0108] Step (1): The kinematics model of the UAV is:
[0109]
[0110] The kinematic equation of the system in the above formula, where, η=[x y ψ] T Indicates that the UAV is in the earth coordinate system (O e x e Y e ) under the position (x, y) and the heading angle ψ under the earth coordinate system; υ=[u, v, r] T Each component in corresponds to the body coordinate system (o b x b the y b ) under forward velocity u, sway velocity v and steering angular velocity r;
[0111] The rotation matrix J(ψ) is
[0112]
[0113] The dynamic eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More