

Unmanned mining truck tracking control system and method based on deep reinforcement learning
A technology of reinforcement learning and control method, which is applied in the field of unmanned mining truck tracking control system, can solve the problem of low trajectory tracking accuracy, achieve the effect of reducing fuel consumption and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
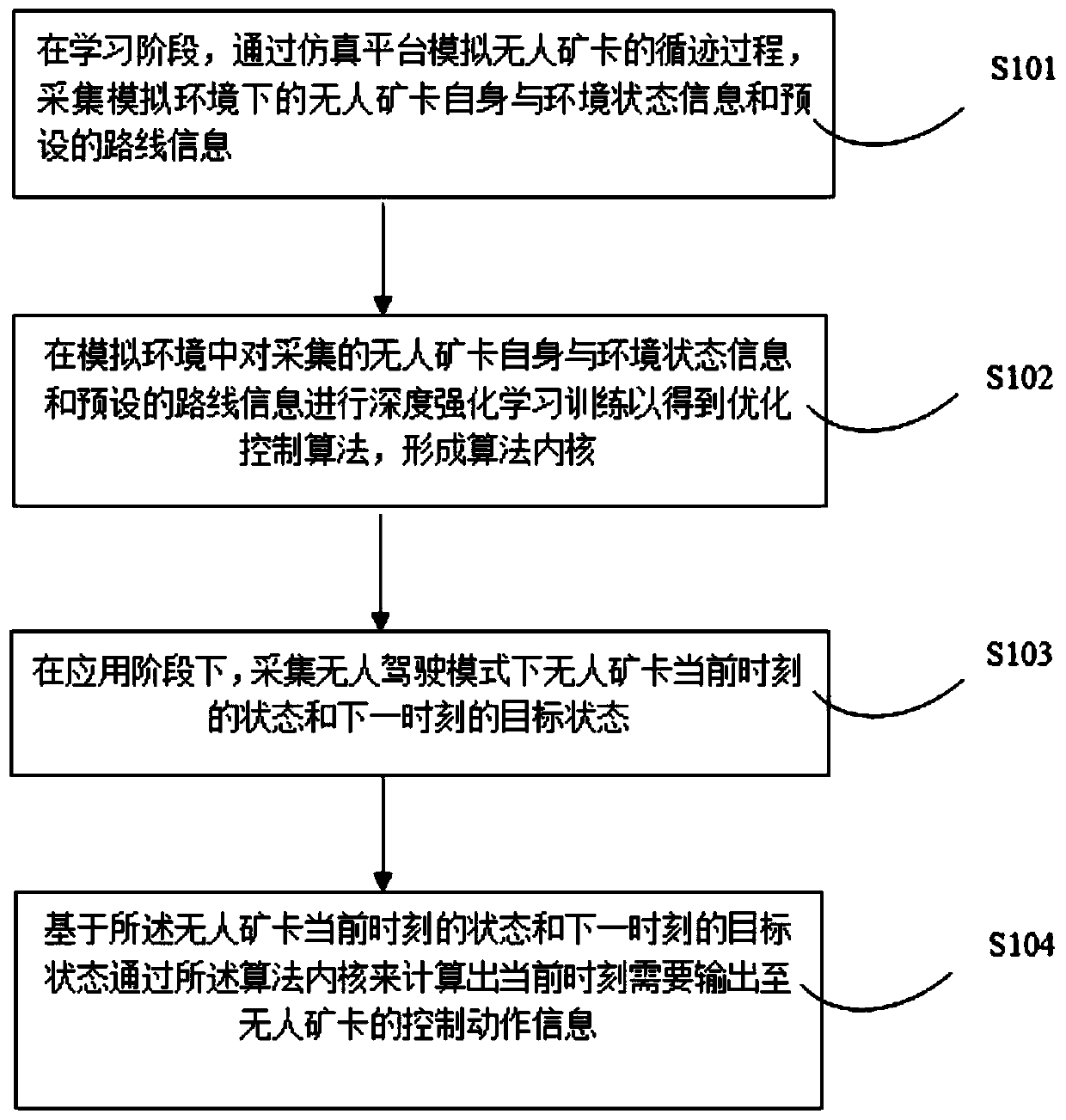
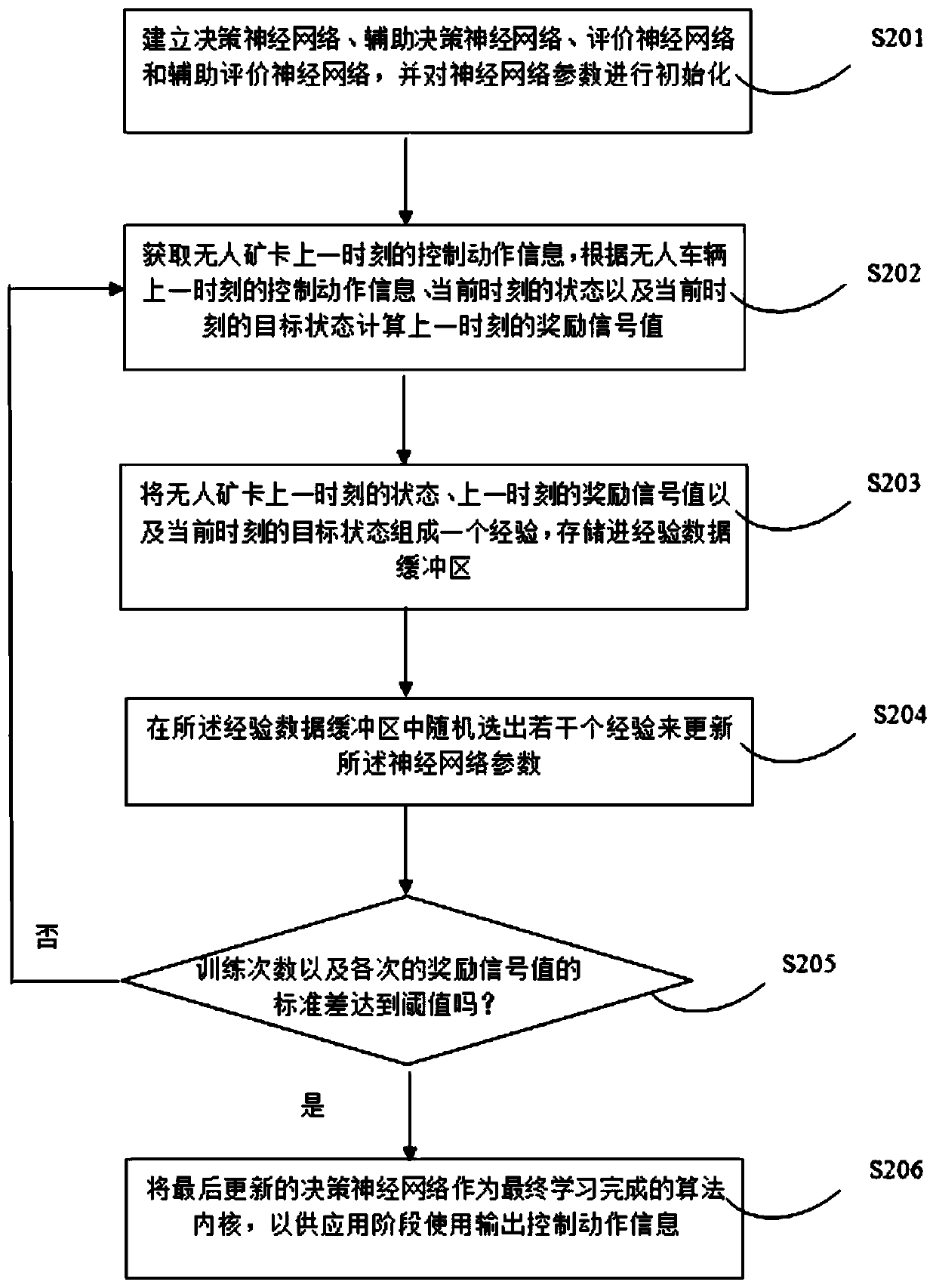
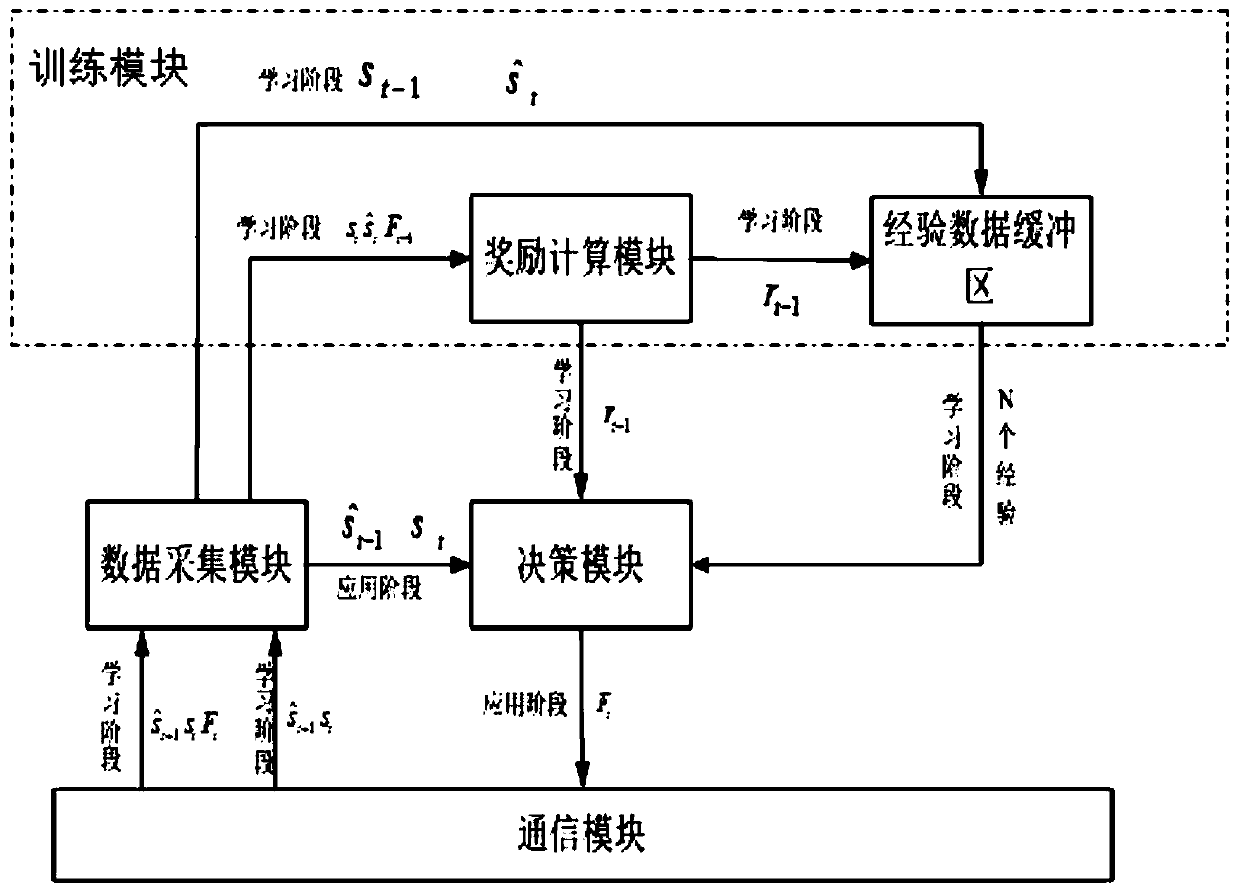
[0055] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0056] As a member of the unmanned driving field, unmanned mining trucks can be divided into three levels: environmental perception system, intelligent decision-making system and control execution system. Among them, the environmental perception system is that the unmanned mining truck relies on the additional sensors of precise navigation, image recognition and radar to collect and fuse data to complete the perception of its own position and attitude, surrounding environment and obstacles. The intelligent decision-making system intelligently makes path planning and decision-making for unmanned mining trucks based on the results of the environmental perception system. The control execution system is based on the driving instructions issued by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More