Telescopic crawling robot in pneumatic pipe
A crawling robot and pneumatic tube technology, applied in the field of robotics, can solve problems such as hidden dangers, damage to electrical components, and explosion safety, and achieve the effect of simple overall structure and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
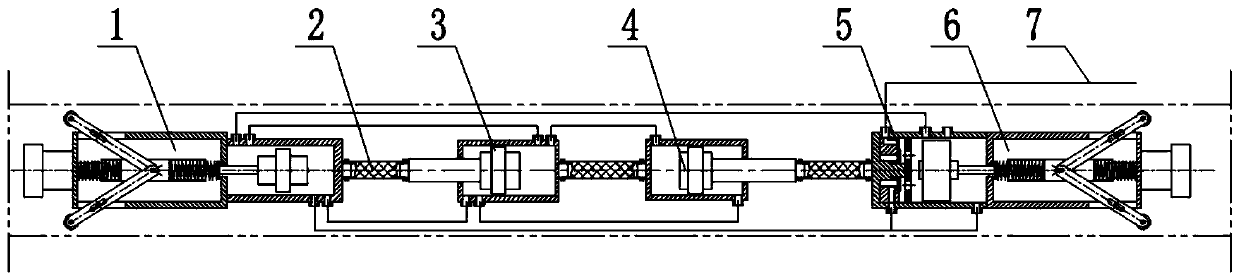
[0035] The present invention is a telescopic crawling robot in a pneumatic tube, the structure of which is as follows: figure 1 As shown, it includes a front support device 1, a front telescopic cylinder 3, a rear telescopic cylinder 4, and an air distribution valve 5 which are connected sequentially through the connecting device 2. The air distribution valve 5 is fixedly connected with a rear support device 6, and the air distribution valve 5 is connected with a power supply Trachea 7, gas distribution valve 5 are also connected front support device 1 and rear support device 6 by trachea, front support device 1 and rear support device 6 are also connected by trachea, and front telescopic cylinder 3 is also connected with front support device 1 and rear by trachea respectively. Telescopic cylinder 4 is connected.
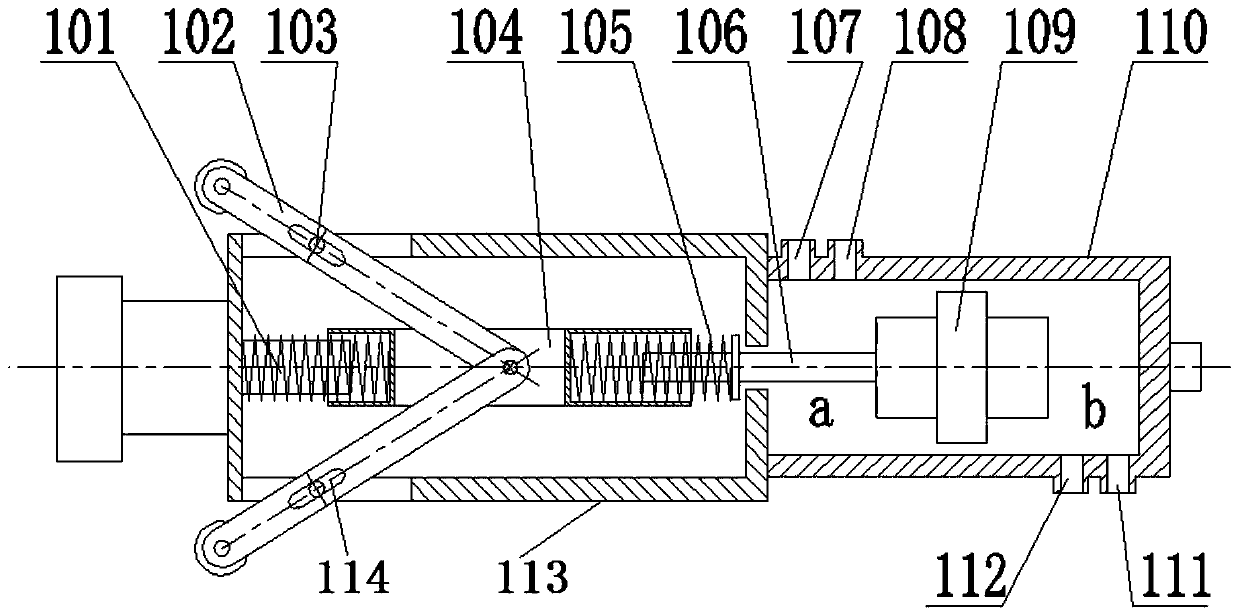
[0036] Such as figure 2 ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap