

Design method of dynamic model based on dual-arm collaborative grinding system
A dynamic model, dual-arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as waste of time, insufficient consideration of dynamic knowledge such as joint motor torque, and damage to the manipulator.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
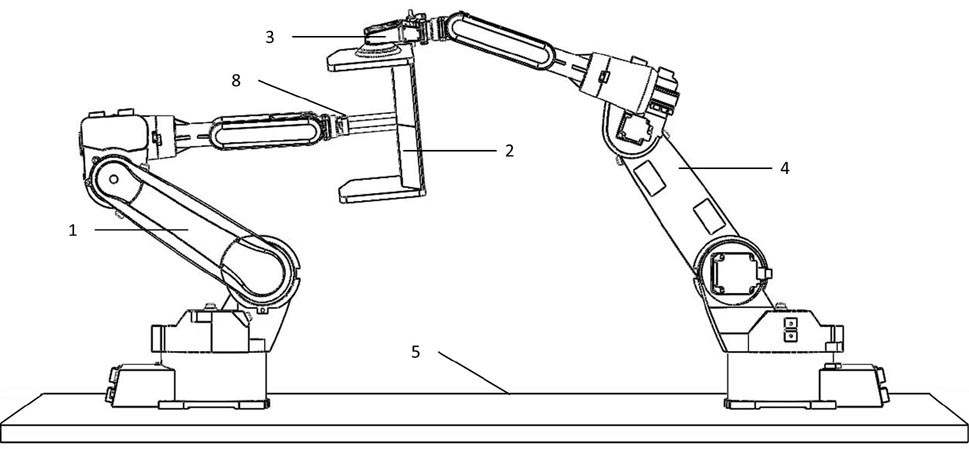
[0065] The dynamic model design method based on the dual-manipulator collaborative grinding system includes the following steps:
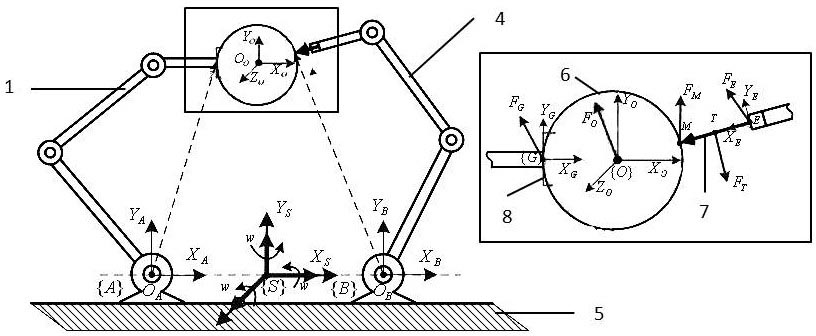
[0066] Step 1, constructing the Jacobian matrix of the dual robotic arm based on the grinding trajectory, at the kinematic level, based on the Jacobian matrix of the dual robotic arm, combined with the physical parameters of the grinding tool 7 and the clamped workpiece 6, the joints of the dual robotic arm Combined with the grinding trajectory, the Jacobian matrix from the grinding trajectory velocity to the joint velocity of each mechanical arm is constructed; the Jacobian matrix links the Cartesian space velocity of the grinding trajectory with the joint velocity of each dual robotic arm;
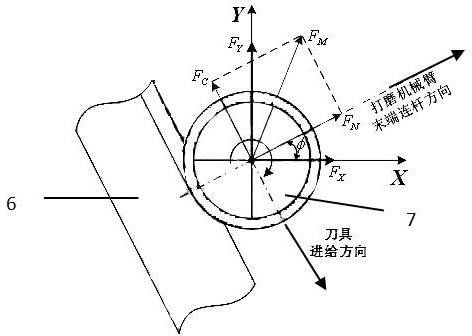
[0067] Step 2, constructing a simplified mechanical model of the grinding force of the grinding tool 7 and the workpie...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More