

Control system of multifunctional full-automatic water surface cleaning ship and control method thereof
A technology of control system and control method, which is applied in the field of control system and multifunctional automatic water surface cleaning ship control, can solve the problems of automatic water surface cleaning ship starting late, existing resources flowing into surrounding waters, and insufficient attention to environmental governance, etc., to achieve Efficient control system and control method, safe and reliable design, and high operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
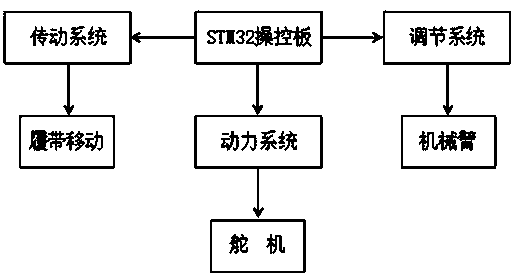
[0025] Such as figure 1 As shown, the control system of the multifunctional fully automatic water surface cleaning ship provided by this embodiment includes an STM32 control panel, an adjustment system, a power system and a transmission system. The STM32 control panel is used to obtain control information and execute corresponding program output control Instructions to the adjustment system, power system and transmission system; the adjustment system is used to receive the control commands sent by the STM32 control board and start the mechanical arm to perform corresponding operations; the power system is used to receive the control sent by the STM32 control board Command and start the steering gear to perform corresponding operations; the transmission system is used to receive the control commands sent by the STM32 control panel and start the crawler to move; the STM32 control panel performs corresponding procedures after receiving the instructions and outputs instructions to ...
Embodiment 2
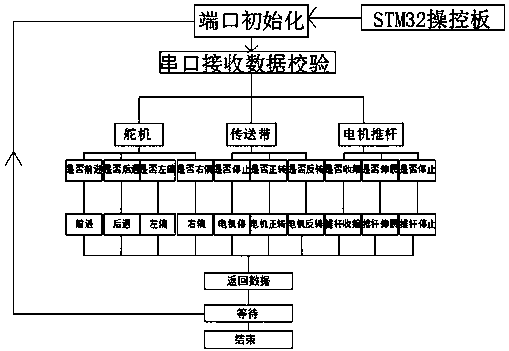
[0032] Such as figure 2 Shown, the control method of multifunctional fully automatic water surface cleaning ship, comprises the following steps:
[0033] S1: STM32 control board port initialization;
[0034] S2: serial port receiving data verification;
[0035] S3: Send commands to the steering gear, conveyor belt and motor push rod;
[0036] S4: Run the command to determine whether to execute the corresponding operation;
[0037] S5: return data cycle to port initialization.
[0038] In this embodiment, the judgment of the running command in step S4 includes judging whether the steering gear is moving forward, backward, leftward, or rightward, and if it is yes, it will perform forward, backward, leftward, rightward operation, and if it is no, it will return Data loops to port initialization.
[0039] In this embodiment, the judgment of the running command in step S4 includes judging whether the conveyor belt stops, rotates forward, and reverses. If it is yes, it will ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More