

Unmanned ship navigation following fixed time formation control method
A fixed time and control method technology, applied in two-dimensional position/course control, control/regulation system, non-electric variable control, etc., can solve problems such as unpredictable system stability and unpredictable convergence time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
[0083] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
[0084] An unmanned ship piloting-following fixed time formation control method, comprising the following steps:
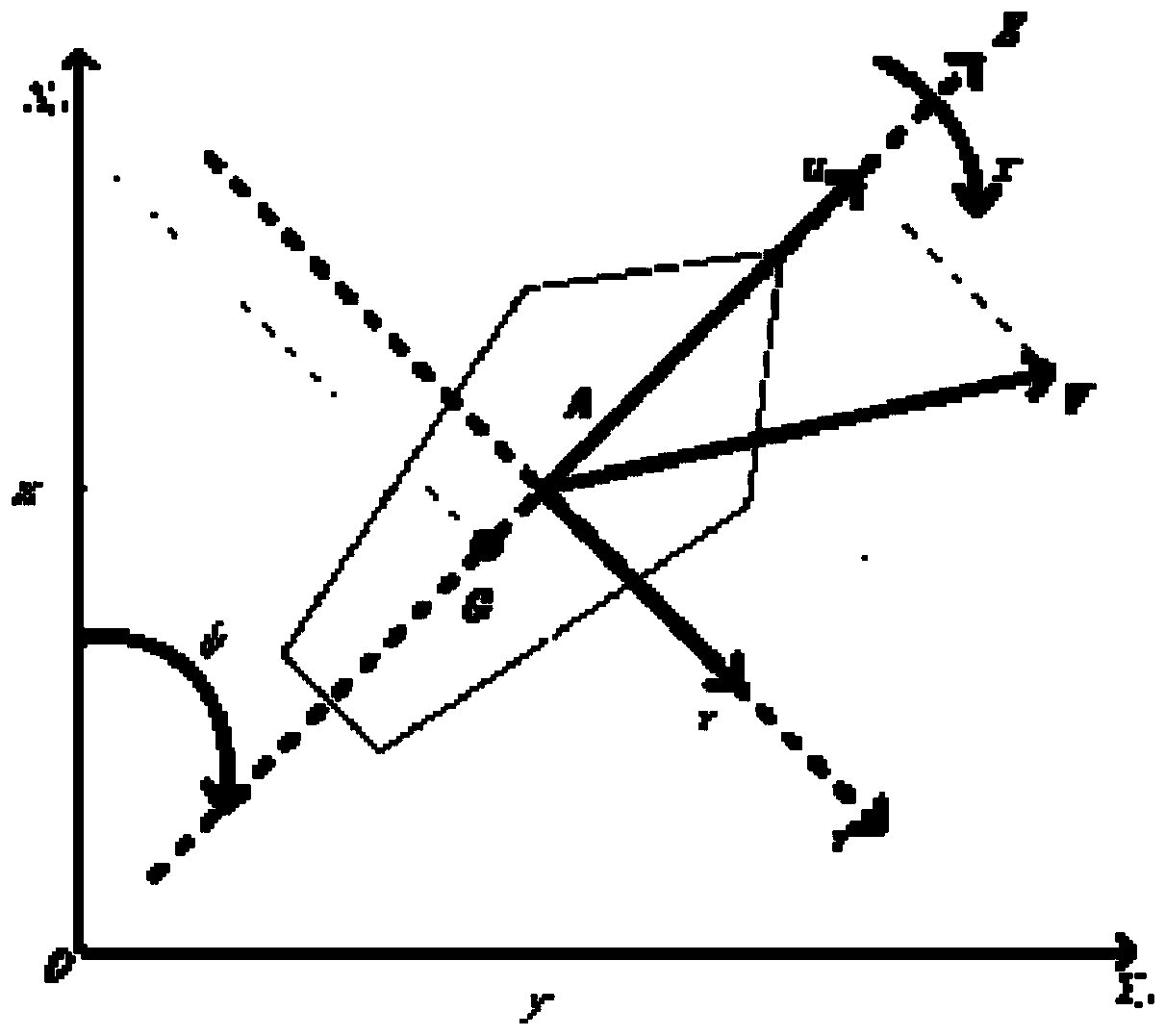
[0085] S1: Establish the dynamics and kinematics models of leading the unmanned ship and following the unmanned ship;
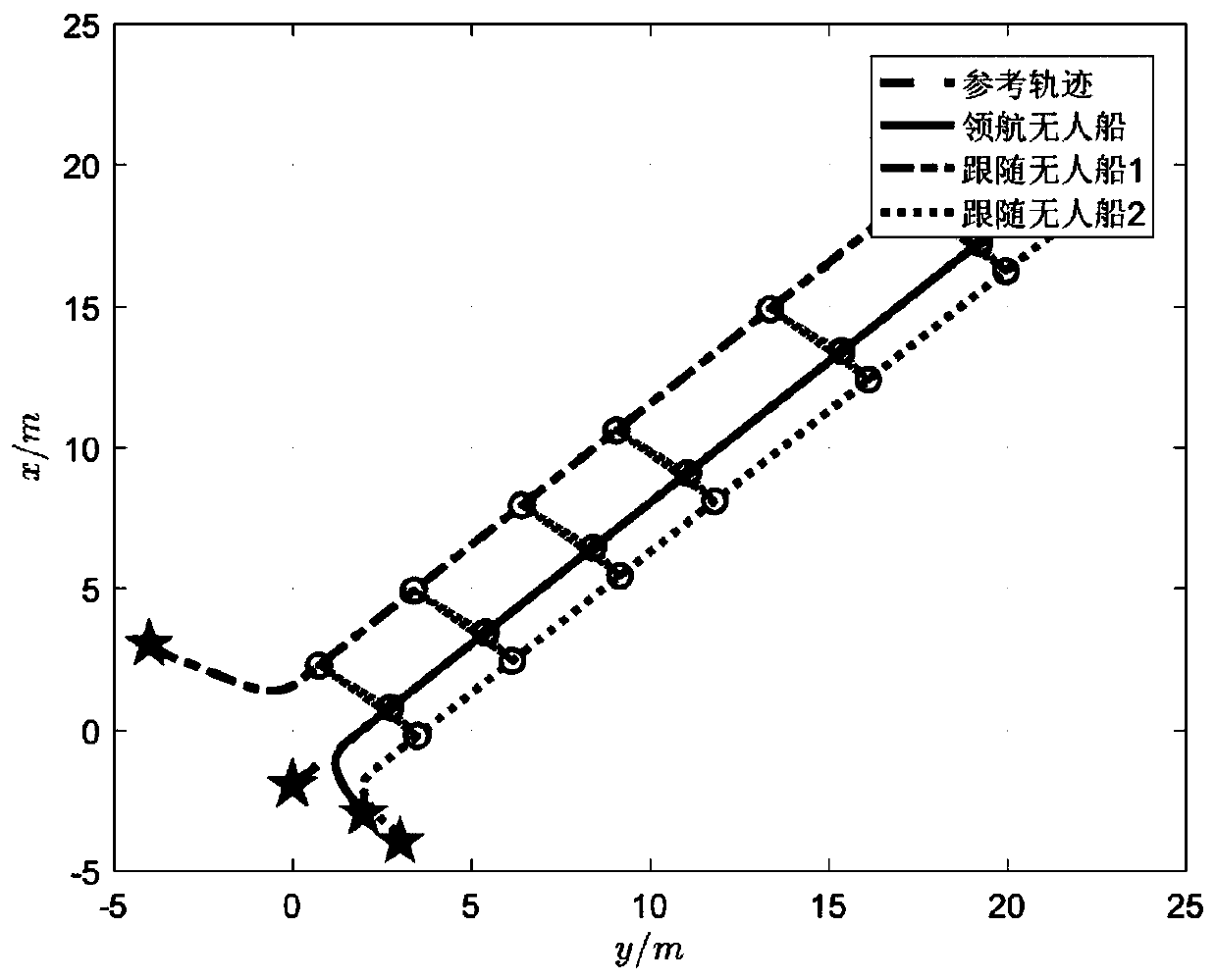
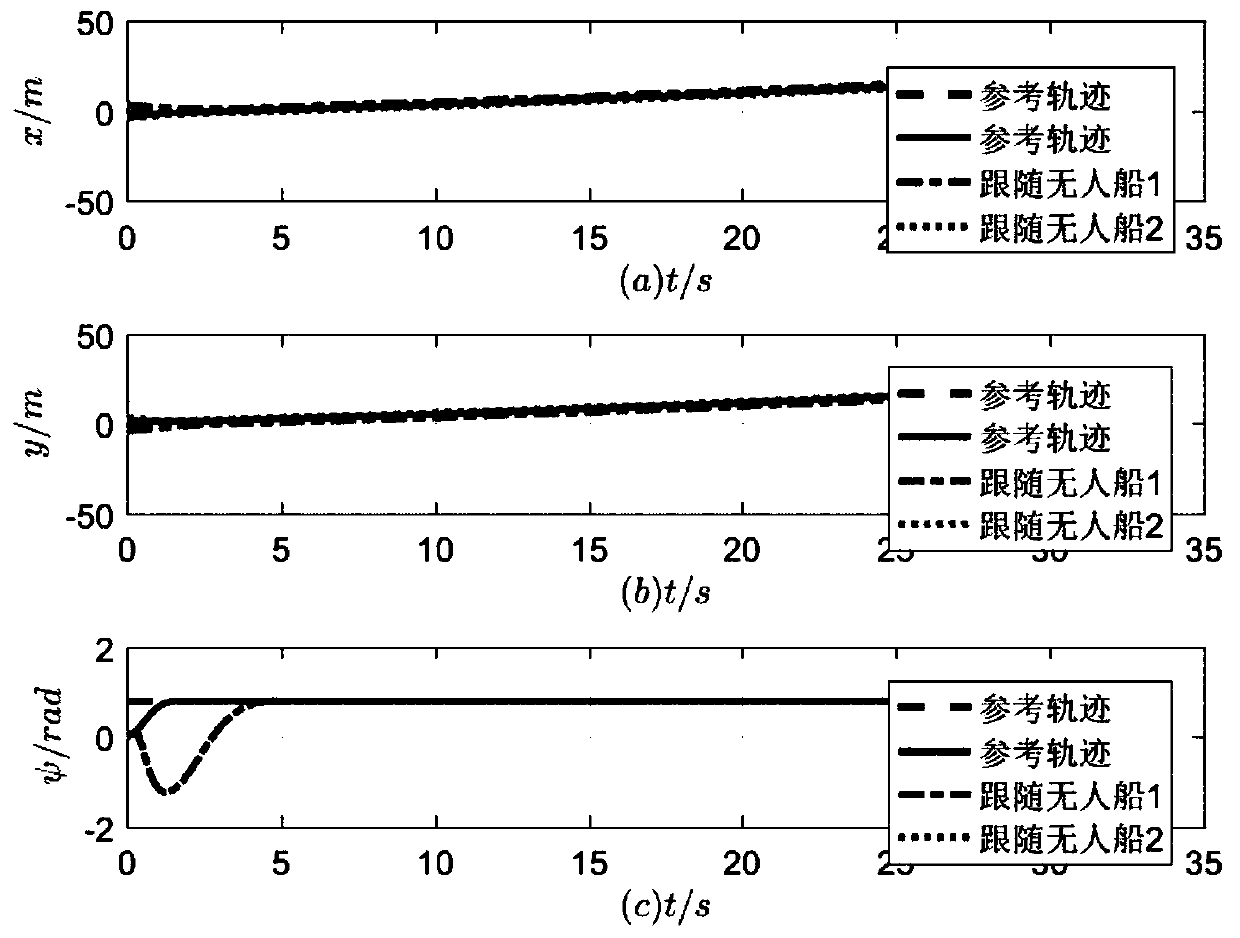
[0086] S2: Design the fixed-time control law of the pilot unmanned ship subsystem to realize the trajectory control of the pilot unmanned ship and provide control input signal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More