

Six-degree-of-freedom pose estimation algorithm based on bounding box outer key point positioning
A pose estimation algorithm and bounding box technology, applied in computing, image analysis, image enhancement, etc., can solve problems such as reduced pose accuracy, large offset length changes, and no consideration of key point differences.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts all belong to the protection scope of the present invention.
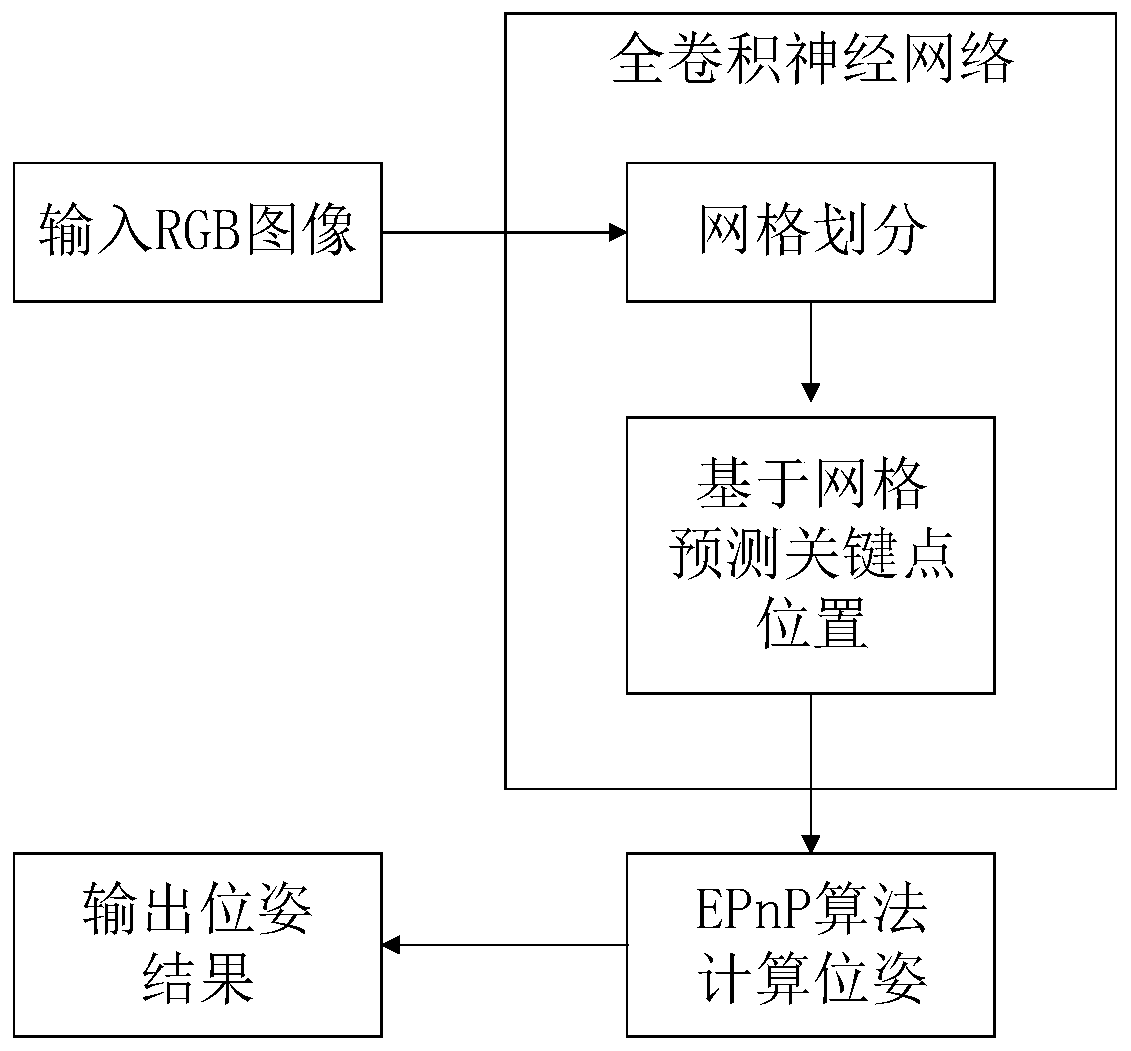
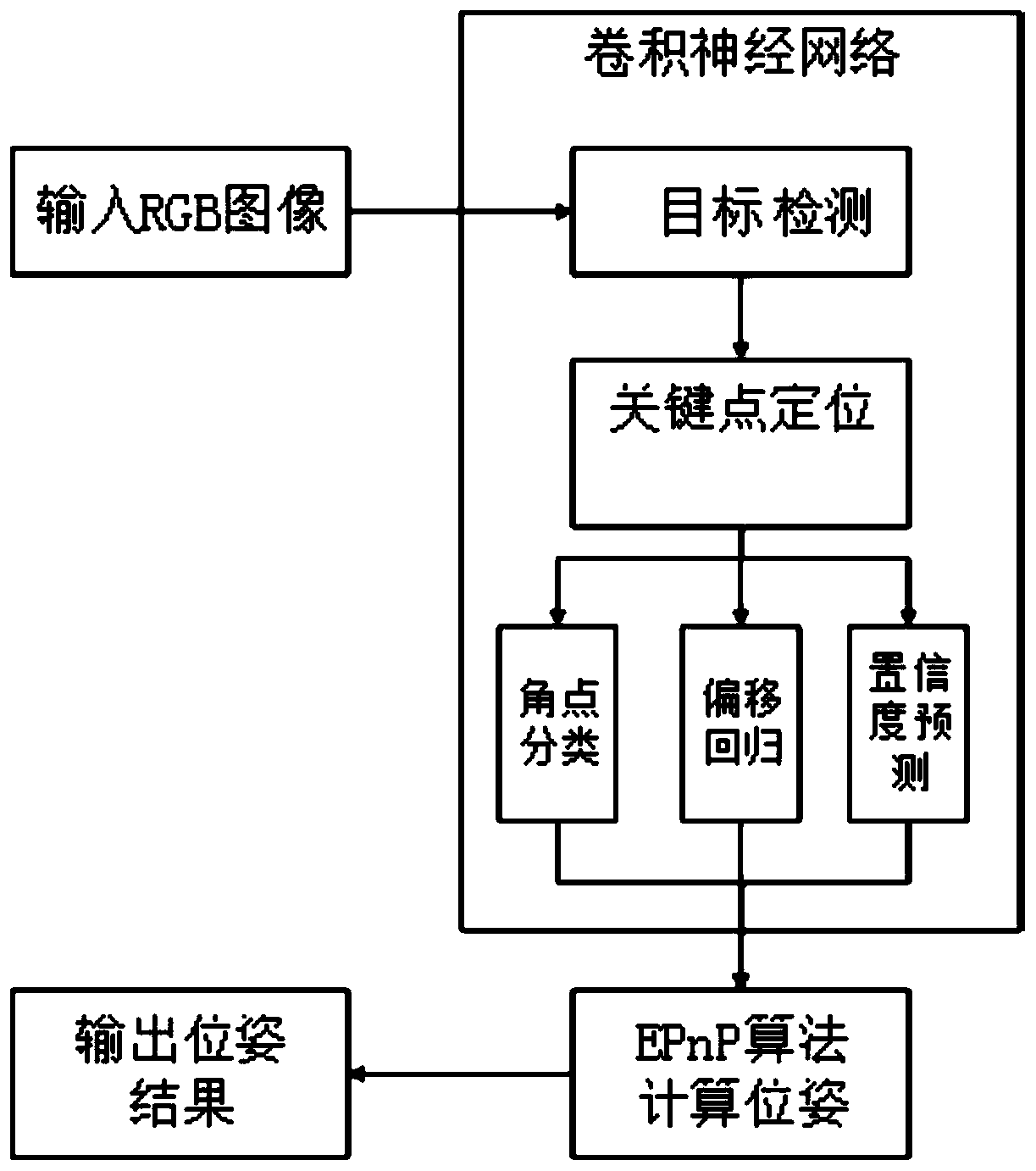
[0074]The present invention first uses the detection module to locate the two-dimensional bounding box of the target, and then predicts the position offset of the key point based on the two-dimensional detection frame. In the second step, the patented algorithm proposes a new bounding box-based key point location method, which combines the classification and regression capabilities of convolutional neural networks, is suitable fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More