

Moving soft robot utilizing ratchet effect and working method thereof
A working method and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as complex motion control, and achieve the effects of avoiding peristalsis, simple structure, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
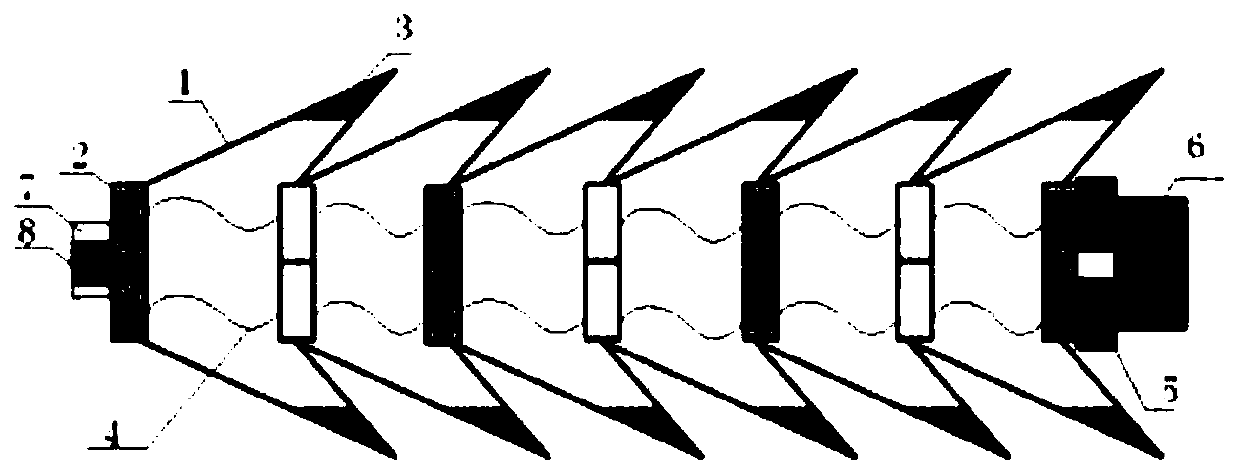
[0024] A kind of mobile soft robot device using the ratchet effect, such as figure 1 As shown, it includes a plurality of flexible frames 1 with horizontal stretching elasticity that are sequentially connected horizontally, and between adjacent flexible frames 1, the front end of the front flexible frame 1 and the tail end of the tail flexible frame 1 are all provided with Double electromagnetic sheets 2, double electromagnetic sheets 2 are two independent electromagnetic sheets, the two electromagnetic sheets are coaxially arranged and symmetrically distributed along the central axis of the flexible frame 1, the polarities between the front and rear adjacent electromagnetic sheets are opposite, and the same side The electromagnetic sheets are connected in series through flexible wires 4, and the electromagnetic sheets on both sides of the tail are respectively provided with control circuit boards 5 for controlling the power-on and power-off time intervals of the corresponding ...
specific Embodiment 2
[0027] The working method of the motion soft robot device with ratchet effect in the above-mentioned specific embodiment one, the specific steps are as follows:
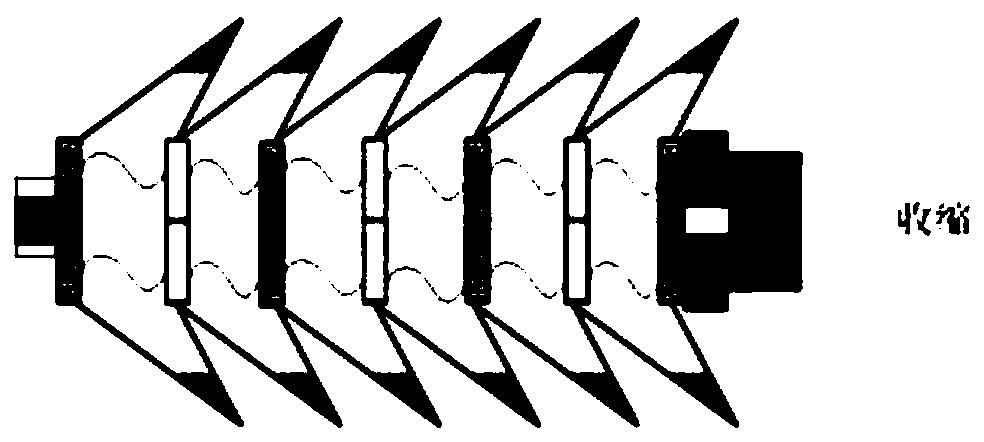
[0028] (1) Turn on the power supply 6, and control the electrification of the electromagnetic sheets through the control circuit board 5 to generate a magnetic field. Two adjacent electromagnetic sheets generate opposite magnetic poles. During the backward movement of the frontmost flexible frame 1, the wedge-shaped angle 3 on it is stuck into the base to prevent it from moving. Under the ratchet effect of the wedge-shaped angle 3, the frontmost flexible frame 1 is stationary, while the rear The flexible frame 1 moves forward under the action of magnetic attraction until all the flexible frames 1 are compressed to the limit, such as figure 2 shown;
[0029] (2) The control circuit board 5 controls the power supply 6 to stop supplying power to the electromagnetic sheet, the magnetism of the electromagnetic sheet dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More