

Method for generating target detection football candidate point of Nao robot based on Heatmap
A target detection and candidate point technology, applied in neural learning methods, instruments, computer parts, etc., can solve real-time limitations, low accuracy, low robustness and other problems, achieve high real-time, accurate classification, high The effect of recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below in conjunction with accompanying drawing and embodiment example, the present invention will be further described:
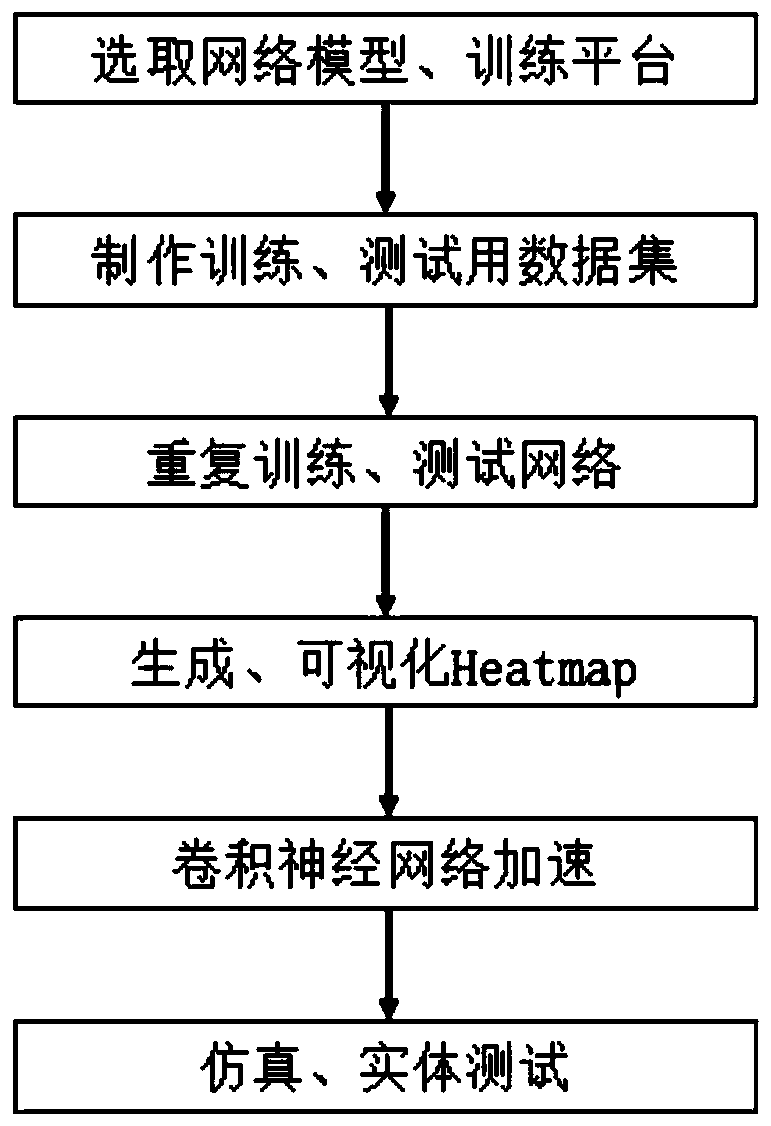
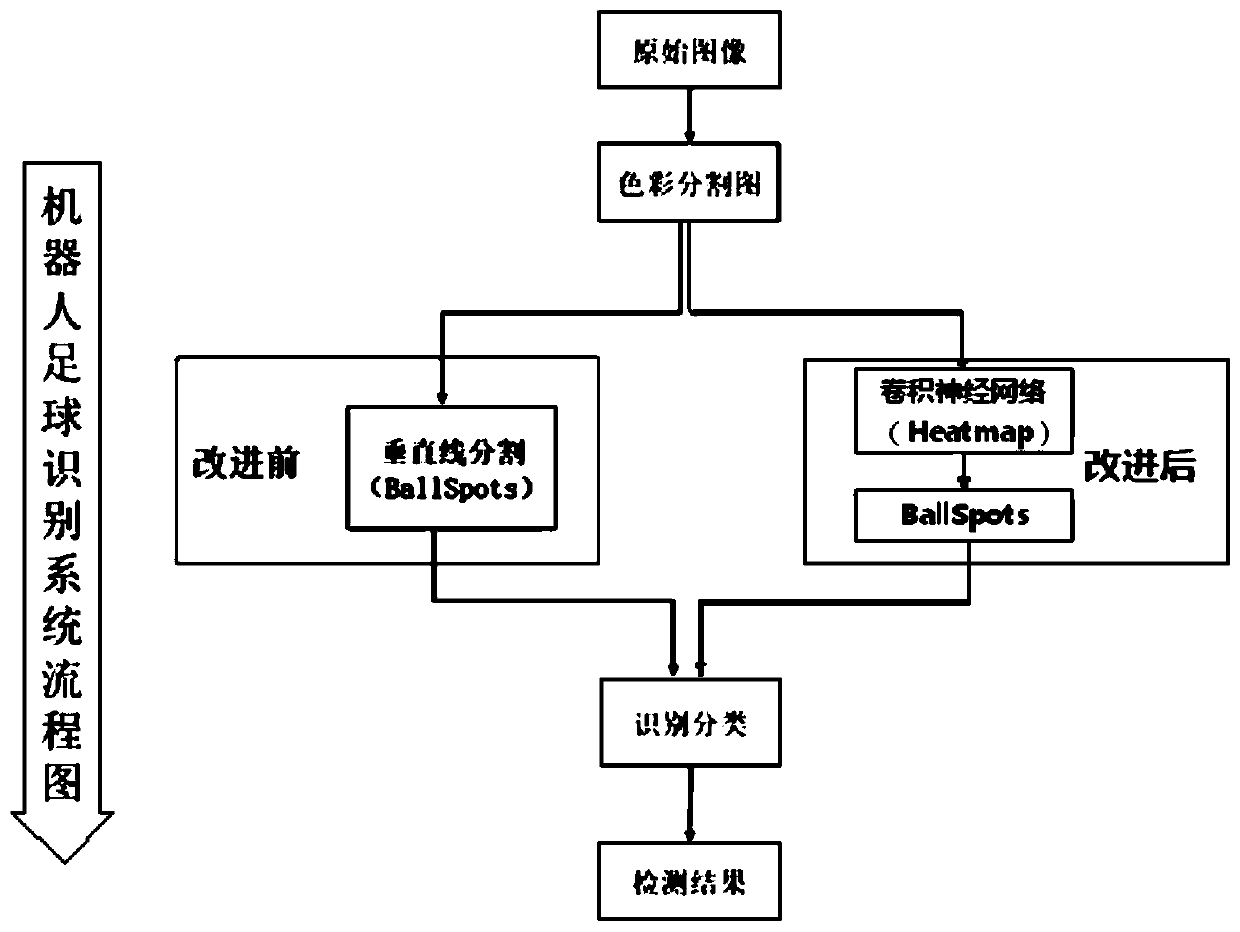
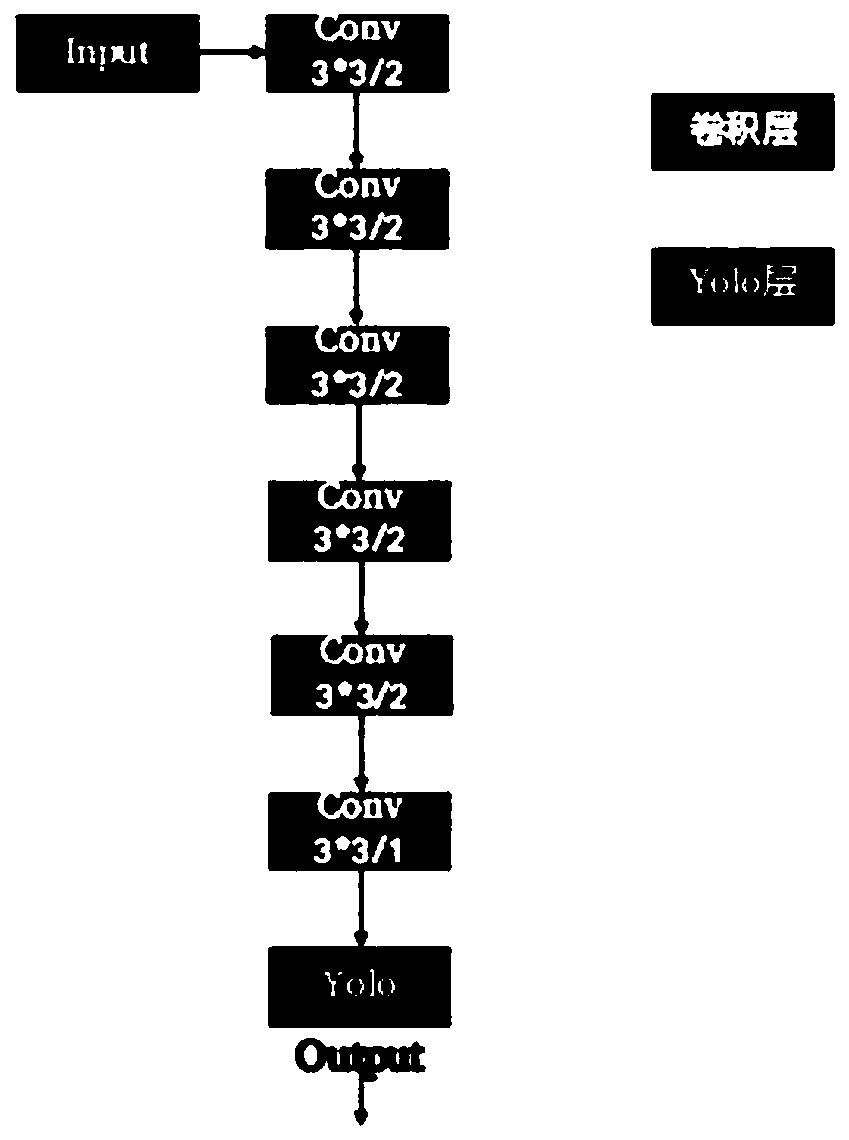
[0039] Such as figure 1 , 2 A heatmap-based method for generating football candidate points for Nao robot target detection is shown, including: S1: Specify the design target and the hardware level of the experimental carrier Nao robot, and determine the convolutional neural network as the target detection model based on deep learning methods , referring to the YoloV3 detection algorithm (target detection algorithm), choose the deep learning training framework DarkNet. Build a target detection model with six convolutional layers and an output layer for training. The network structure is as follows: image 3 shown.
[0040] S2: Simulate the competition environment, obtain physical photos from the camera of the Nao robot, collect a large number of pictures, and use LabelImg software to label and organize them to obtain the following: Figure 4 The V...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More