

Track planning method and system for lane centering auxiliary self-adaptive cruise
A technology of adaptive cruise and trajectory planning, which is applied in the field of trajectory planning of lane centering assisting adaptive cruise, and can solve the problems that vehicles cannot perform lateral control and automatic driving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
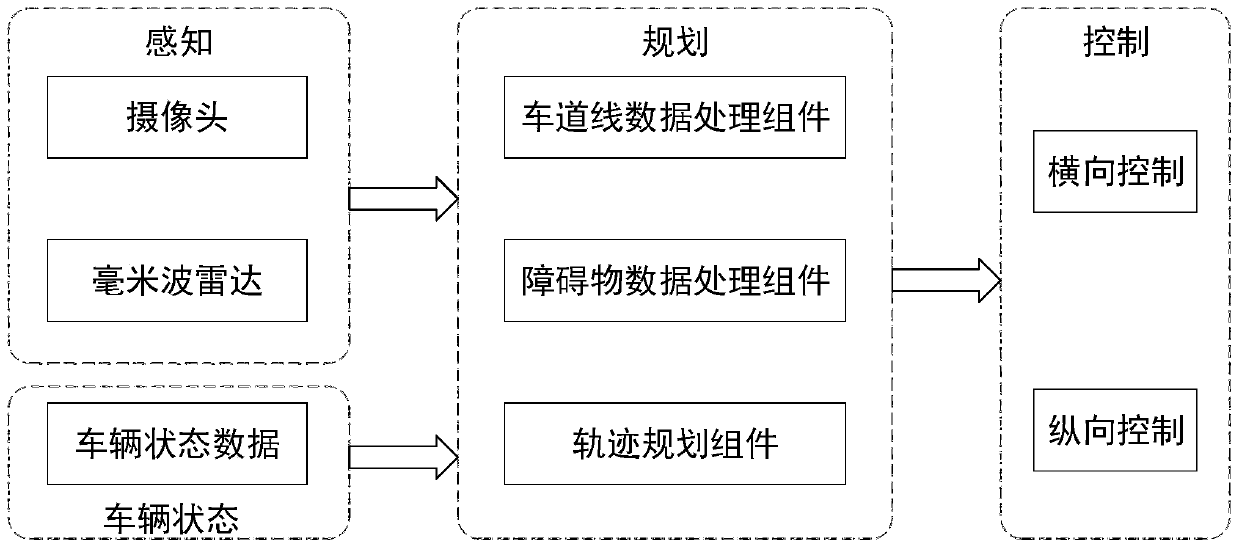
[0054] Such as figure 1 As shown, a trajectory planning system for lane centering assistance adaptive cruise of the present invention includes a perception module, a planning module and a control module, and the perception module includes vehicle state data collected by a camera, millimeter wave radar and a vehicle state data acquisition module. The planning module includes a lane line data processing component (module), an obstacle data processing component (module) and a trajectory planning component (module). The control module includes a lateral control module and a longitudinal control module.
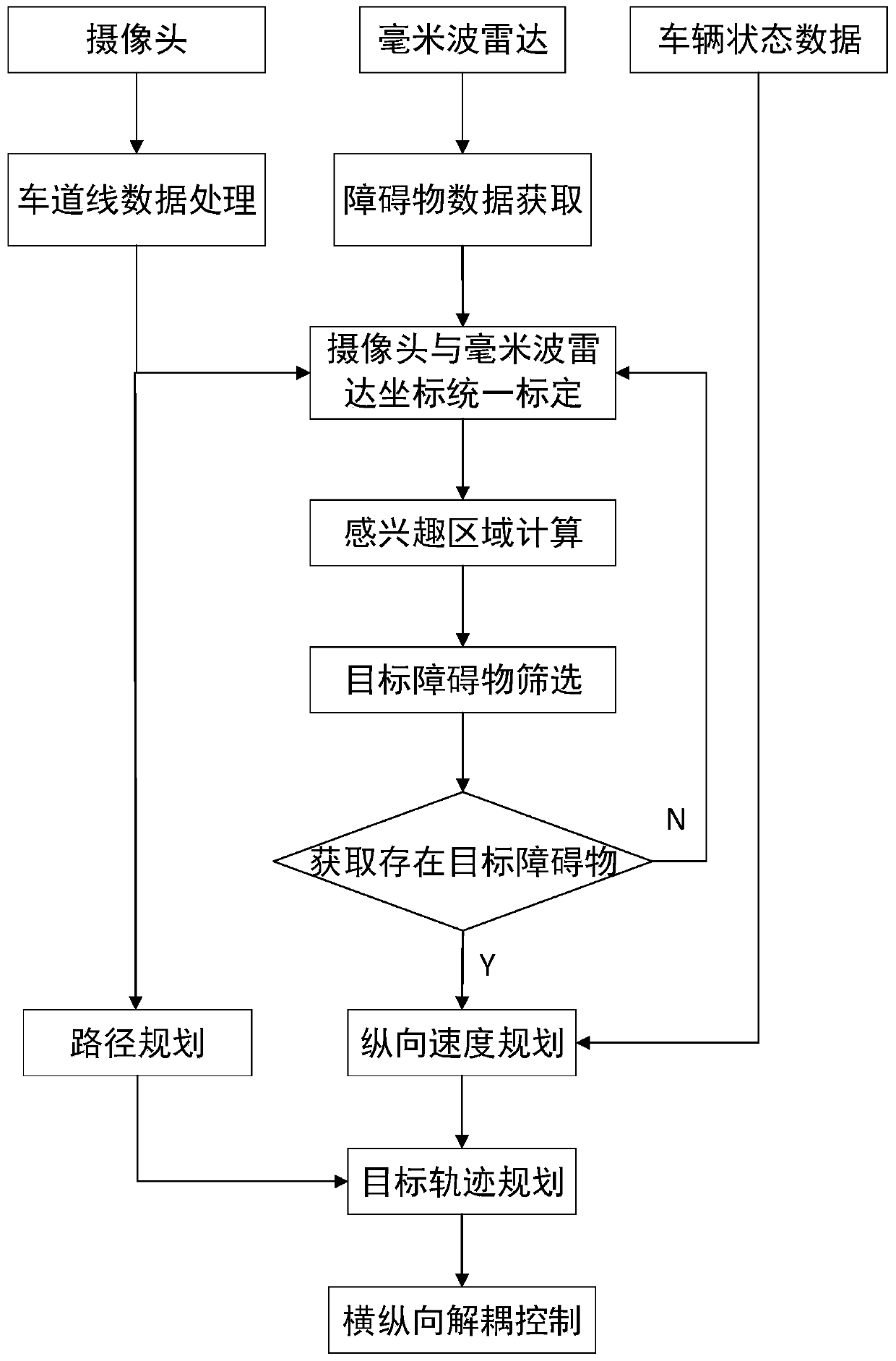
[0055] The lane line data processing component generates the region of interest of the own vehicle according to the lane line data fed back by the camera, and sends the result to the obstacle data processing component.
[0056] The obstacle data processing component detects the surrounding obstacle information through the millimeter-wave radar, and first screens the obstacles in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More