

Intelligent decision-making and local trajectory planning method for autonomous vehicle and decision-making system thereof
A trajectory planning and intelligent decision-making technology, which is applied in the field of intelligent decision-making and local trajectory planning of autonomous vehicles and its decision-making system, which can solve the problems of large amount of calculation, long time consumption and high uncontrollability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The specific embodiments of the present invention will be further described in detail by describing the embodiments below with reference to the accompanying drawings, so as to help those skilled in the art have a more complete, accurate and in-depth understanding of the inventive concepts and technical solutions of the present invention.
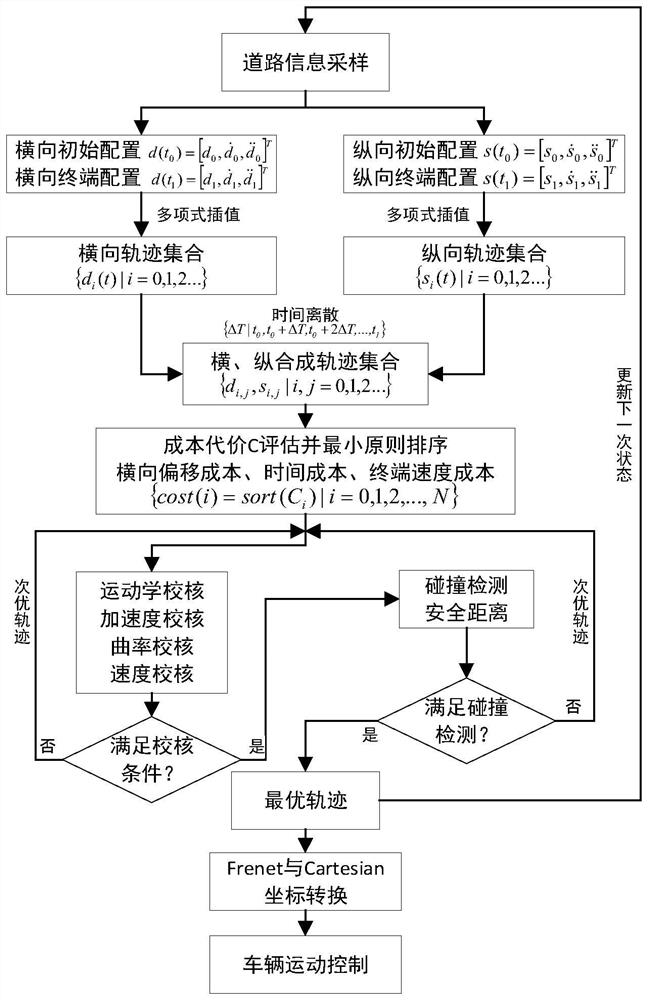
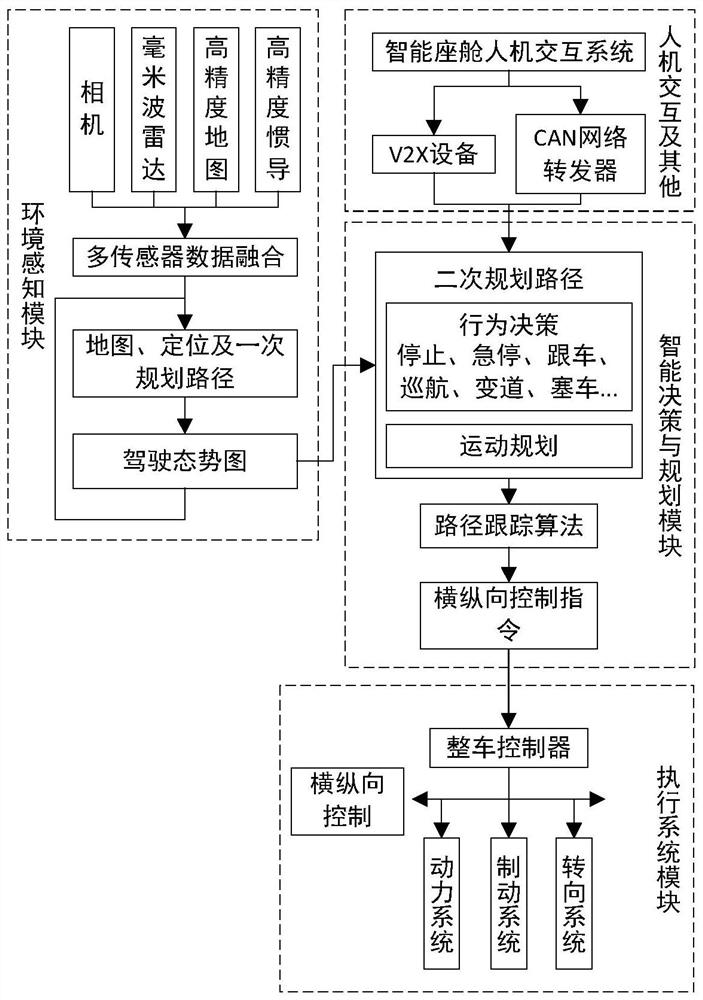
[0054] Such as Figure 1-2 As shown, the present invention provides a method for intelligent decision-making and local trajectory planning of an automatic driving vehicle, comprising the following steps:
[0055] Step 1. Sampling the given vehicle current position and given target position point by road information;
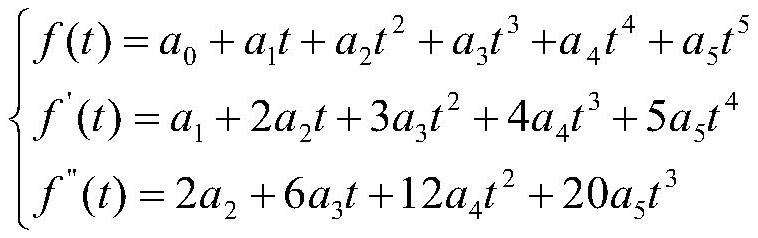
[0056] Step 2. Simplify the trajectory calculation through the Frenet coordinate system, use polynomial interpolation to obtain the path corresponding to the future traversal trajectory of the vehicle, and solve the trajectory set through the initial state and target state of the vehicle;
[0057] Specifically: given th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More