

Double-leg and double-wheel composite motion robot
A compound motion and robot technology, applied in the field of robots and leg-wheeled mobile robots, can solve the problems of low leg and foot motion efficiency, insufficient adaptability to the terrain of wheeled motion, etc., and achieve the effect of high moving speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
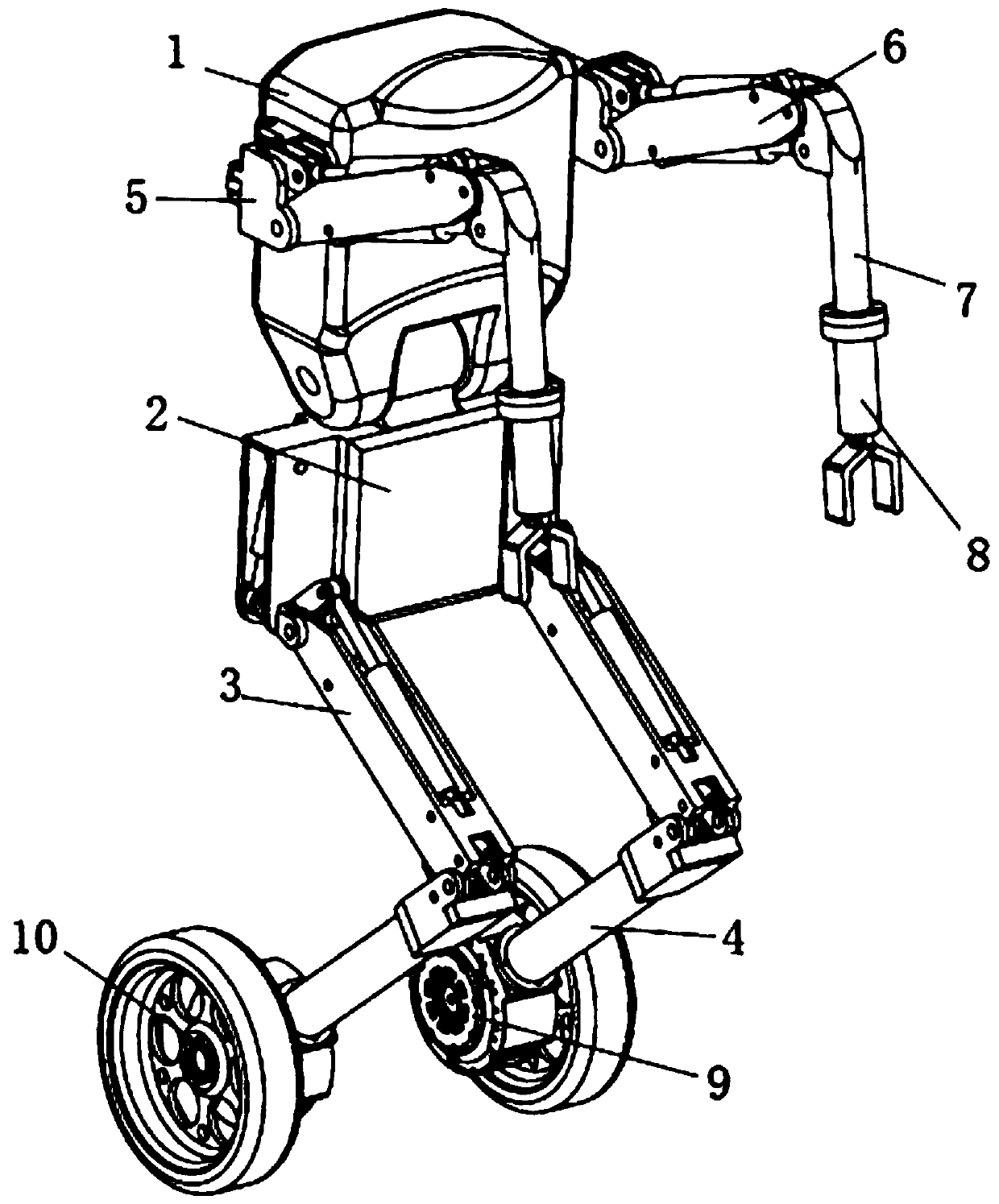
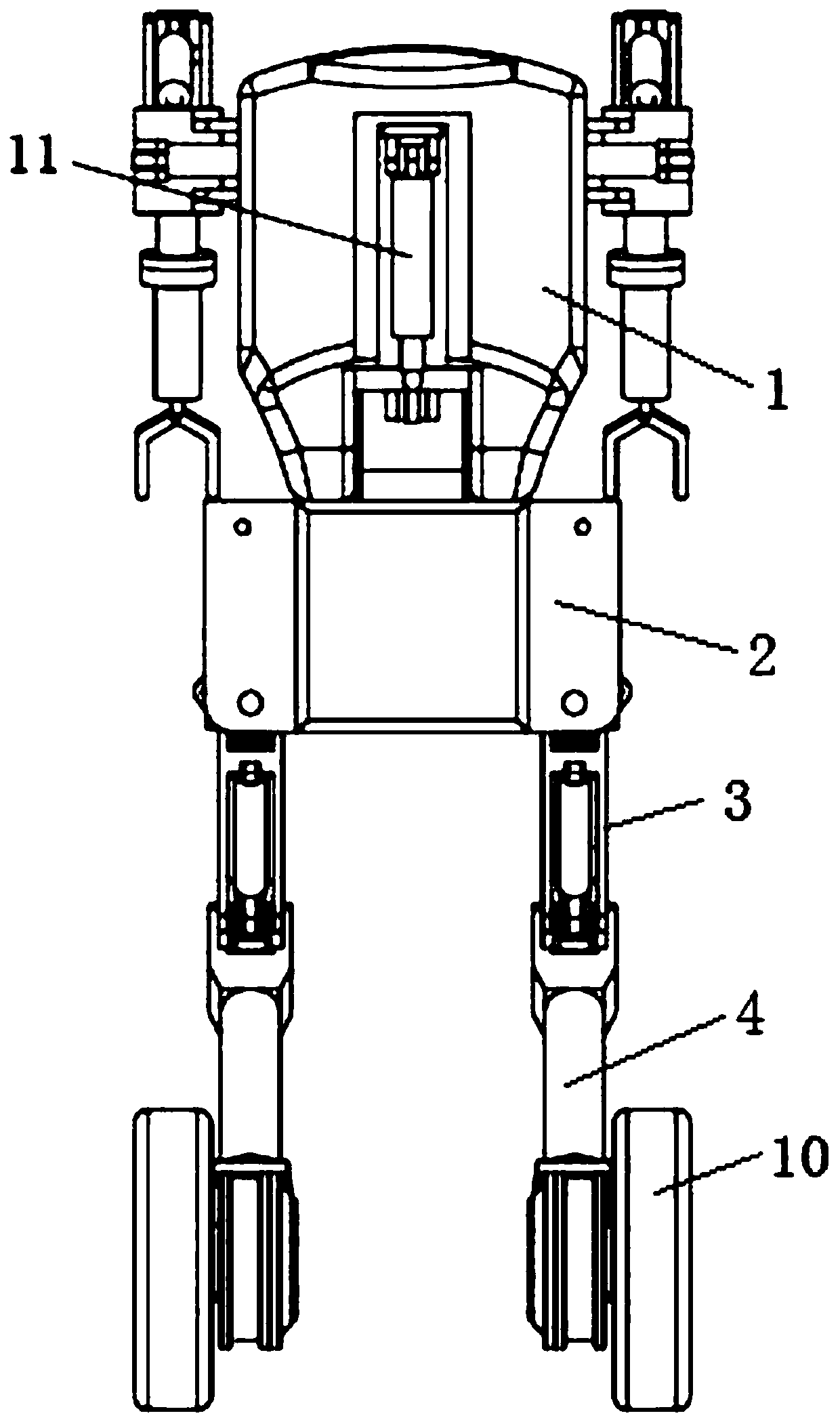
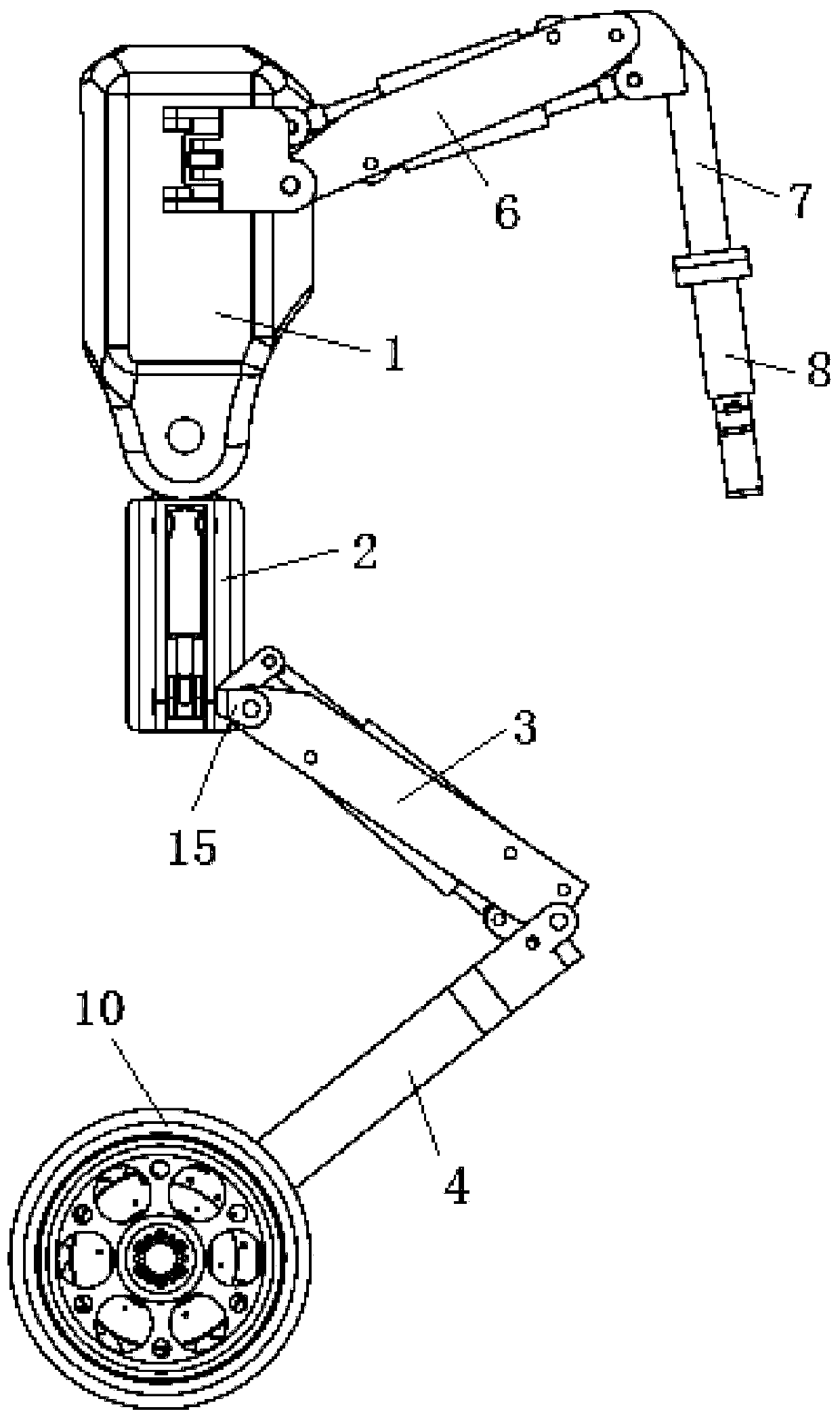
[0028] Each joint of the robot proposed by the present invention is directly driven by a hydraulic cylinder, which is simpler than the joint drive method of the prior art, and compared with the prior art, there is one more degree of freedom for side swing and one less degree of freedom for torsion at the hip joint , adding 1 torso pitch degree of freedom and 2 sets of upper body mechanisms.
[0029] The compound motion robot with two legs and two wheels of the present invention, such as figure 1 , figure 2 with image 3 Shown, comprise trunk part, mechanical leg, driving wheel 10 and mechanical arm. The torso part is made up of a torso 1 and a crotch 2, and the torso 1 and the crotch 2 are connected by a rotary joint, and a trunk-crotch hydraulic cylinder 11 is connected between the two (see figure 2 ), the pitching degree of freedom of the torso 1 is controlled by the torso-crotch hydraulic cylinder 11. Two mechanical legs are arranged on both sides of the crotch 2, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More