

Human body safety assessment method and system in human-machine collaboration
A human-robot collaboration and safety assessment technology, applied in manipulators, instruments, computing, etc., can solve problems such as inability to investigate specific risks, operator safety hazards, and robots without safety awareness, so that human-robot collaboration can be safer, more efficient, and avoided. The effect of a dangerous situation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The principles and features of the present invention will be described below with reference to the accompanying drawings. The examples are only used to explain the present invention, but not to limit the scope of the present invention.
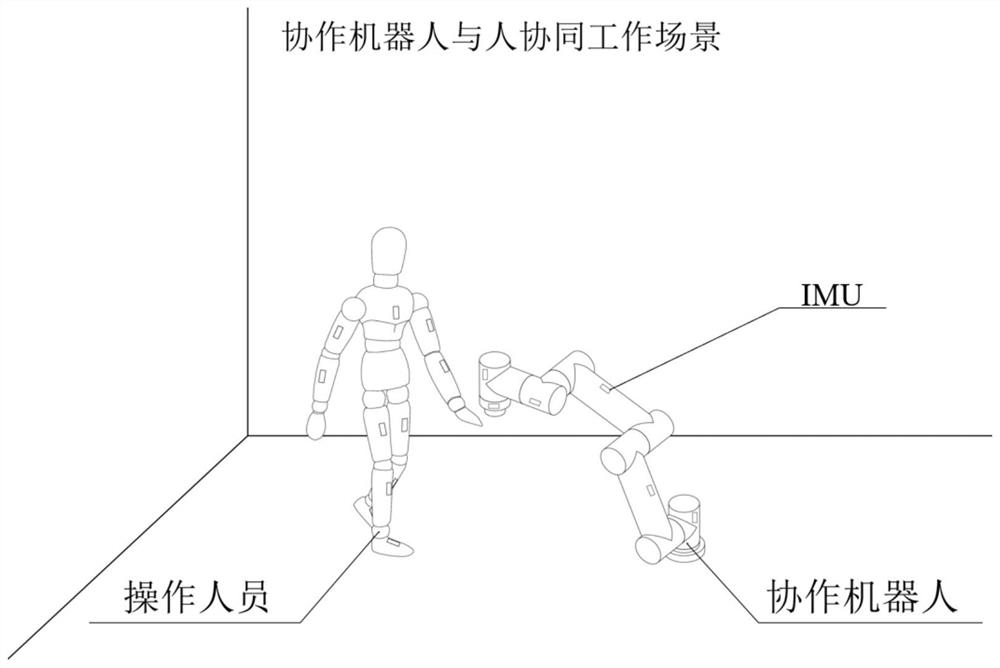
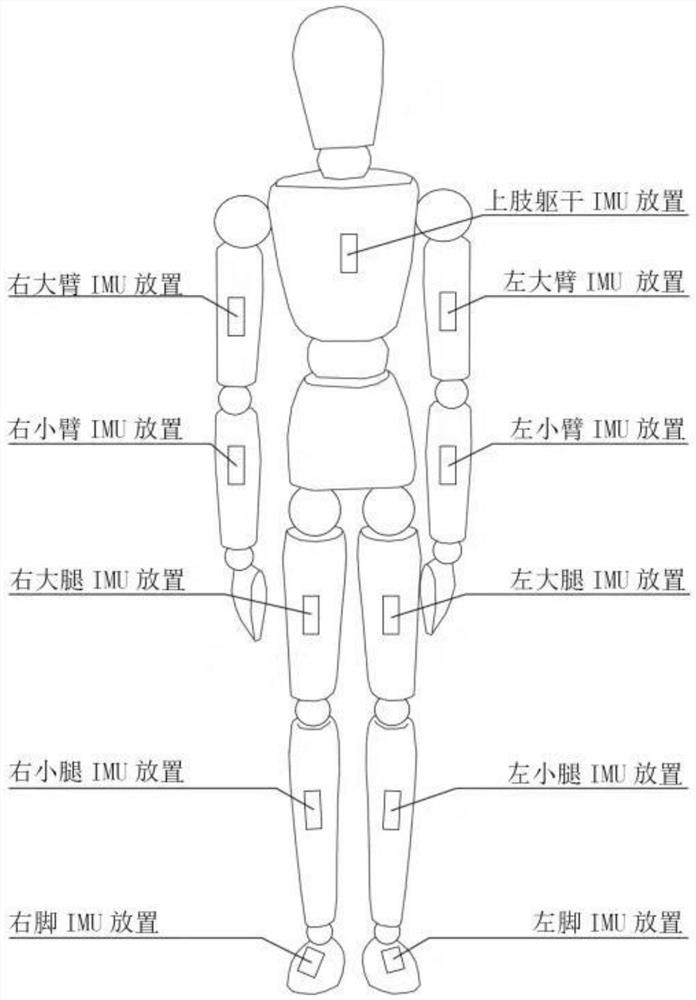
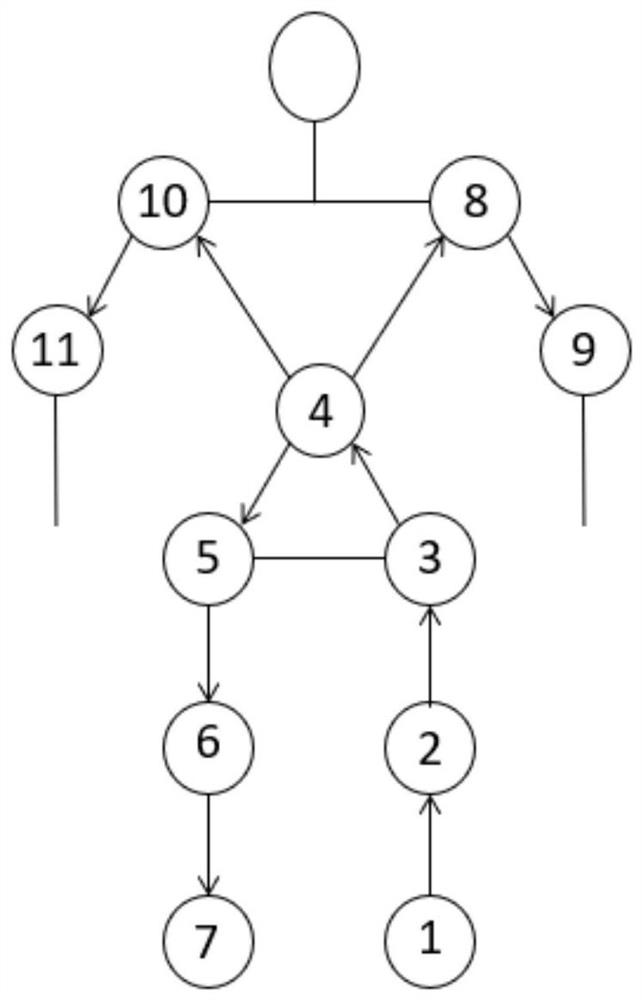
[0072] In the present invention, through the set test environment, both the robot and the operator wear an inertial measurement unit (Inertial measurement unit, IMU for short) suit, such as figure 1 As shown, the collaborative robot works according to the predetermined trajectory, and the operator cooperates with the collaborative robot. During the whole process, the multi-inertial measurement unit system first collects the motion data of the robot and the human body, and then filters the data and uses the positive motion Learn functions, obtain the position information and motion posture of the robot and the human body, and assign them to the three-dimensional model. The three-dimensional model reproduces the motion state of the robot a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More