

Mining self-power-generation type inspection robot system and control method
An inspection robot and self-generating technology, applied in the field of robotics, can solve problems such as battery pack battery working time limit
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
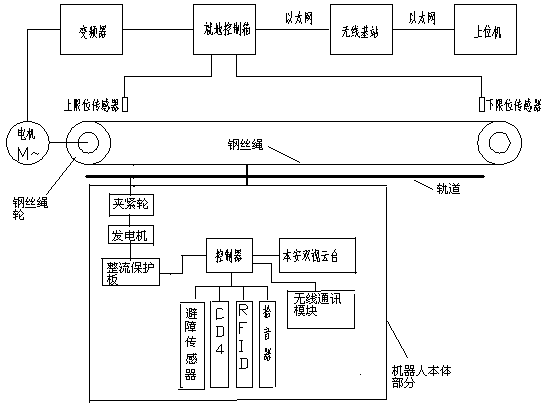
[0021] Such as figure 1 As shown, a self-generating inspection robot system for mining is composed of two parts: the drive control part and the robot body.
[0022] The drive control part includes: upper computer, wireless base station, local control box, frequency converter, motor, wire rope, wire rope pulley, track, upper limit sensor and lower limit sensor. The upper computer communicates with the wireless base station through Ethernet connection; the wireless base station communicates with the local control box through Ethernet connection; the local control box is connected with a frequency converter, and the frequency converter drives the motor to rotate. A wire rope wheel is respectively installed at the starting point and the end point of the inspection robot inspection line, and the wire rope is wound on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More