

Swarm type carrier loader cooperative carrying control system and method
A control system and control method technology, applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc., can solve the problem of the inability to realize multi-vehicle bee colony coordinated transportation, and the lack of safety To ensure that the accuracy is difficult to be guaranteed, etc., to achieve the effects of improving positioning accuracy and system robustness, saving energy, and enhancing practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
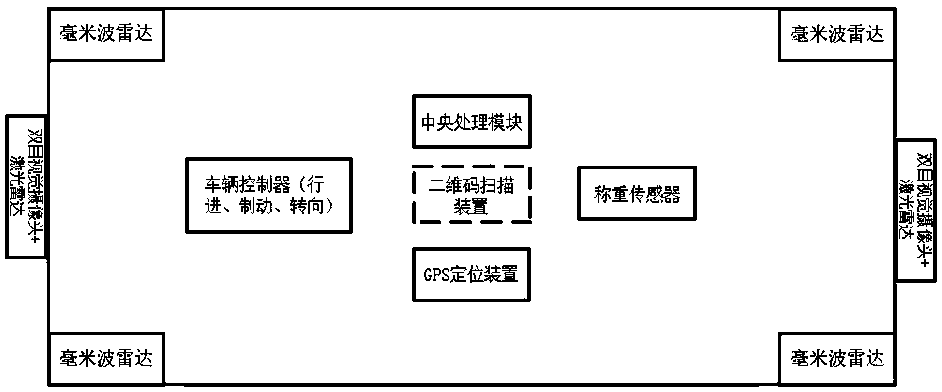
[0028] The present invention provides a coordinated carrying control system of bee colony vehicles, such as figure 1 As shown, it includes: at least two binocular camera devices, multiple radar devices, GPS positioning devices, two-dimensional code scanning devices, load cells and a central processing module.
[0029] The binocular camera device is installed on the front and rear of the vehicle respectively, and is used for measuring the distance of the parking marking line in the judgment of the parking position and detecting the obstacles in the parking area in front of the vehicle in the process of parking, and sending the detection data to Central processing module.
[0030] The radar devices are respectively installed on the front, rear and surroundings of the vehicle, and are used to judge the relative distance between itself a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More