

Portable peripheral control device for simulating endoscopy procedures
A peripherally controlled, portable technology that can be used in teaching models, educational tools, computer-aided surgery, etc., to solve problems such as adverse effects, inconsistent teaching requirements, difficulty in providing updates, and use of digital teaching platforms that can be accessed online
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
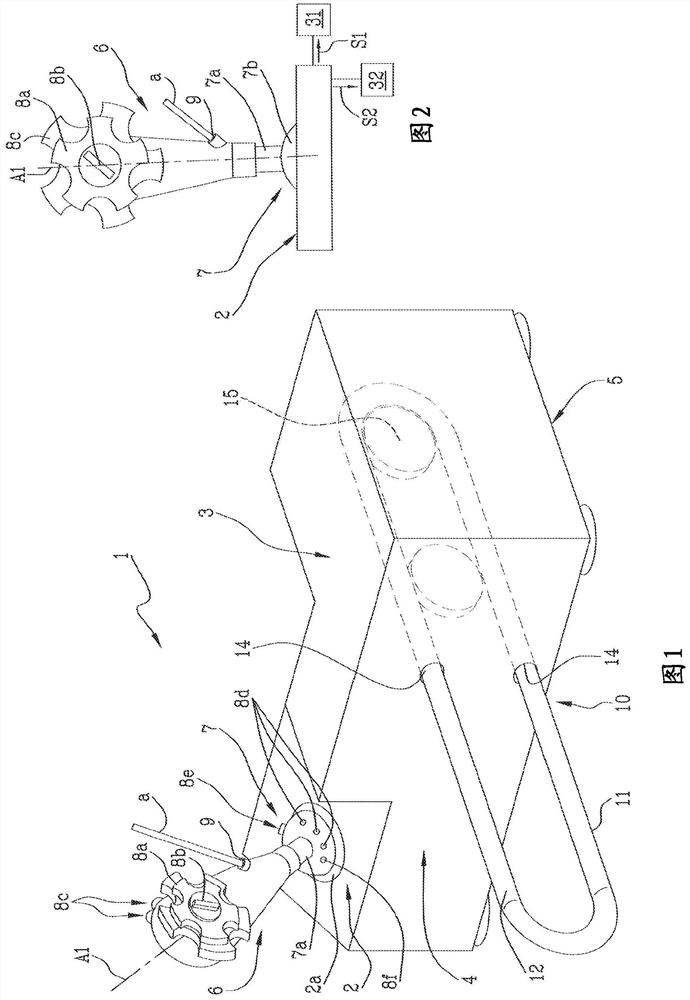
[0043] Referring to the drawings, reference numeral 1 generally designates a portable peripheral control device for simulating an endoscopy procedure.
[0044] The term "portable" means that the peripheral device 1 can be carried, can be easily moved and transported from one place to another, or does not require fixing means and can therefore be connected to a suitably programmed or programmable computer where it can be Any position is used, as described in more detail below.
[0045] The peripheral control device 1 is configured to be connected to the computer "C".
[0046] In some embodiments, the connection to the computer "C" is performed through a physical connection, such as a cable for transferring data, preferably a USB type cable, and the peripheral control device 1 is configured to be connected to said cable.
[0047] According to an alternative embodiment, the connection uses a method such as or A wireless data connection is made, and the peripheral control dev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More