

Underactuated finger combination mechanism for changing enveloping space by radially adjusting swing rod fulcrums
A combined mechanism and under-actuated technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of limiting the ability to adapt to different object sizes, reducing the grasping performance of the manipulator, and losing the flexibility of grasping, achieving self-adaptive High performance and flexibility, light weight and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
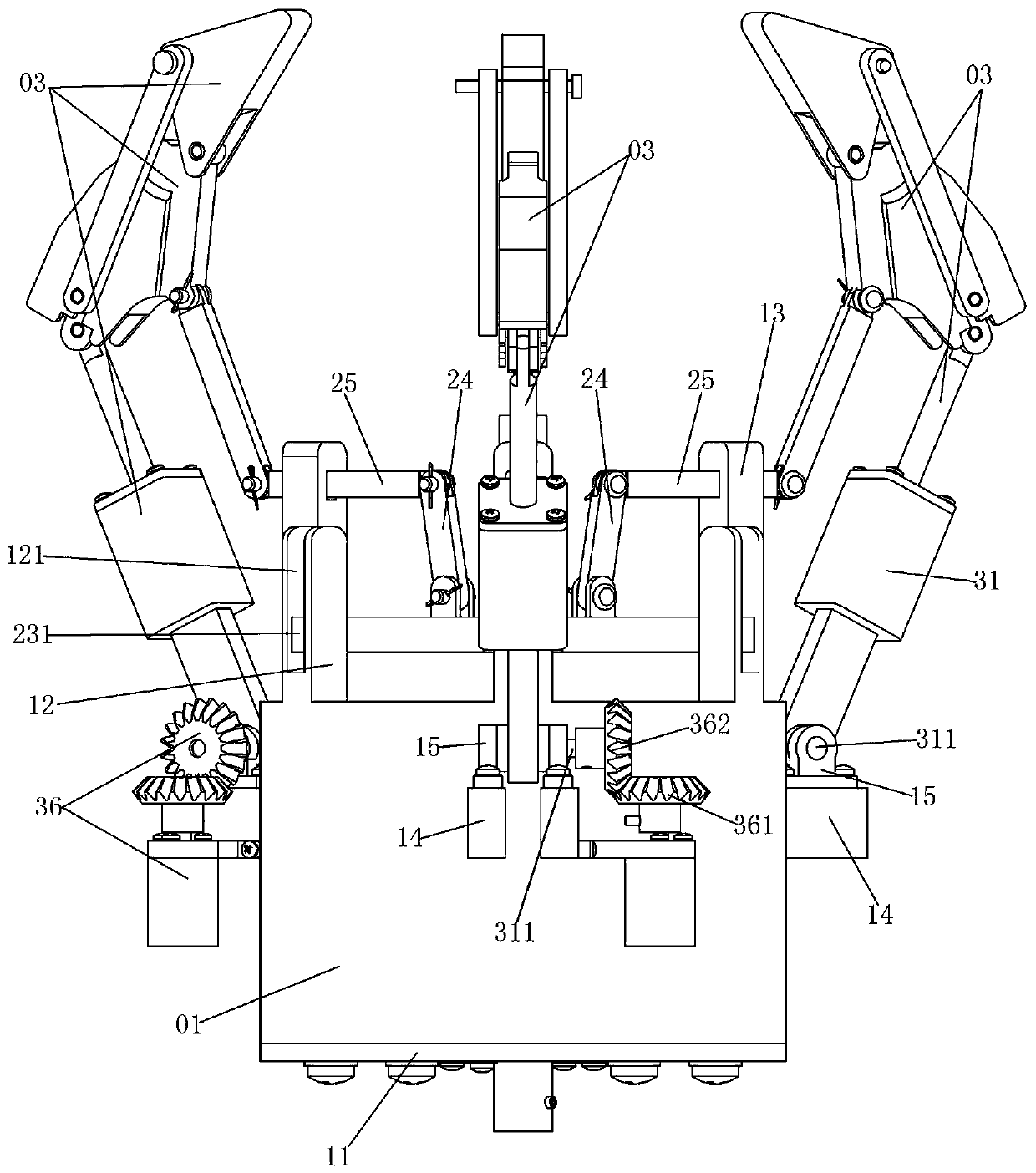
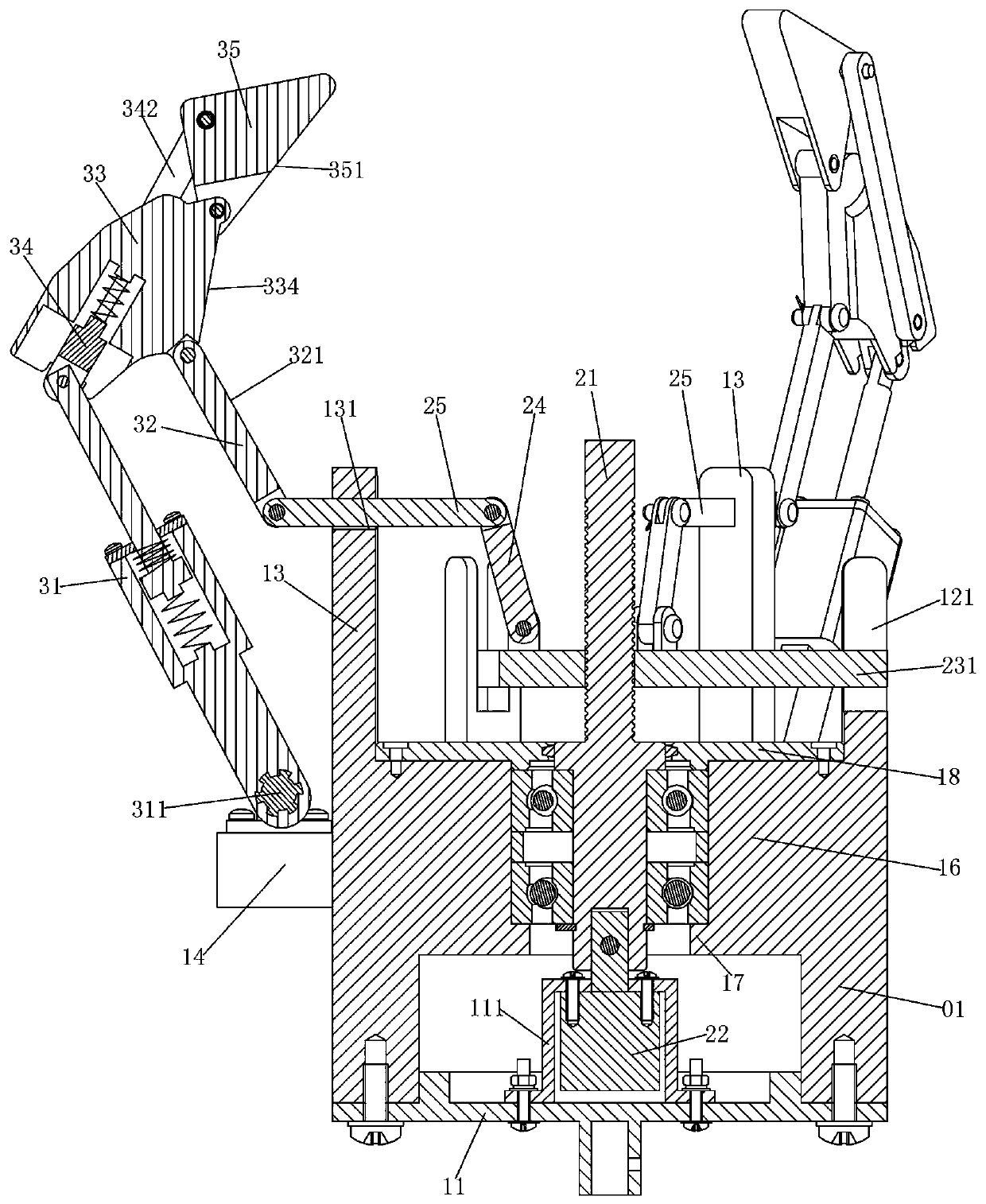
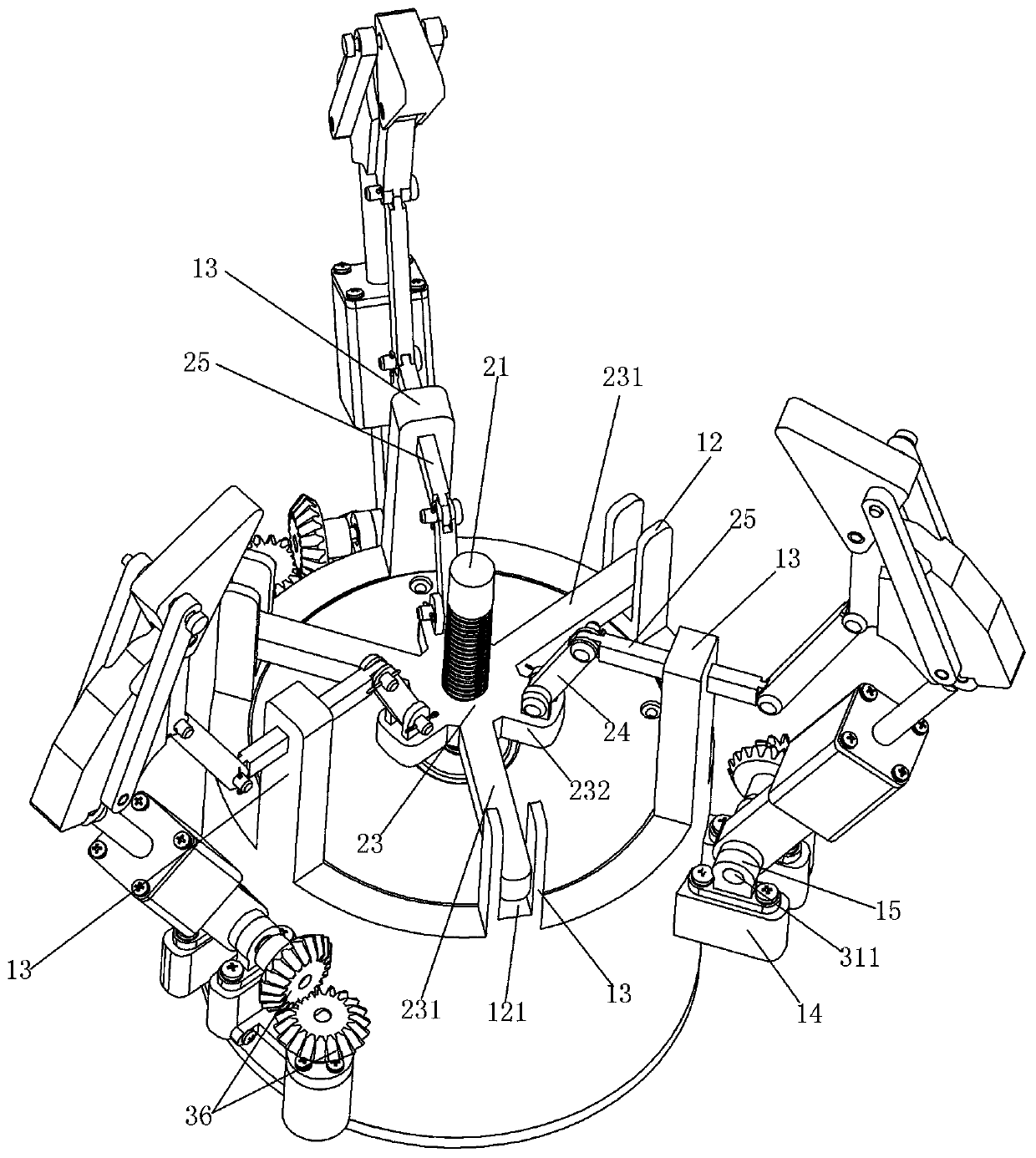
[0026] Embodiment one, refer to the description attached figure 1 - 8. An underactuated finger combination mechanism for radially adjusting the fulcrum of the pendulum to change the envelope space, characterized in that: the underactuated finger mechanism includes a cylindrical frame shell, which is evenly distributed on the lower part of the outer surface of the frame shell The three-finger grasping assembly, the envelope space adjustment assembly set at the lower end of the rack shell; the upper end cover is fixed on the upper port of the rack shell, the motor support is fixed in the middle of the bottom surface of the upper end cover, and the envelope space adjustment assembly includes a coaxial The lead screw, lead screw motor, and ring-shaped lifting adjustment disc installed in the frame shell, the lead screw motor is installed in the above-mentioned motor support, and the upper end of the lead screw is provided with a connecting section that is fixedly connected with th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More