Vehicle navigation mcu adaptive learning control method and circuit
A technology of self-adaptive learning and car navigation, which is applied in the field of car navigation MCU self-adaptive learning square control, which can solve problems such as difficult button learning process, easy mistriggering of square control buttons, and small resistance range of steering wheel, etc., so as to shorten the learning process of square control process, improve user experience, and save operating time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
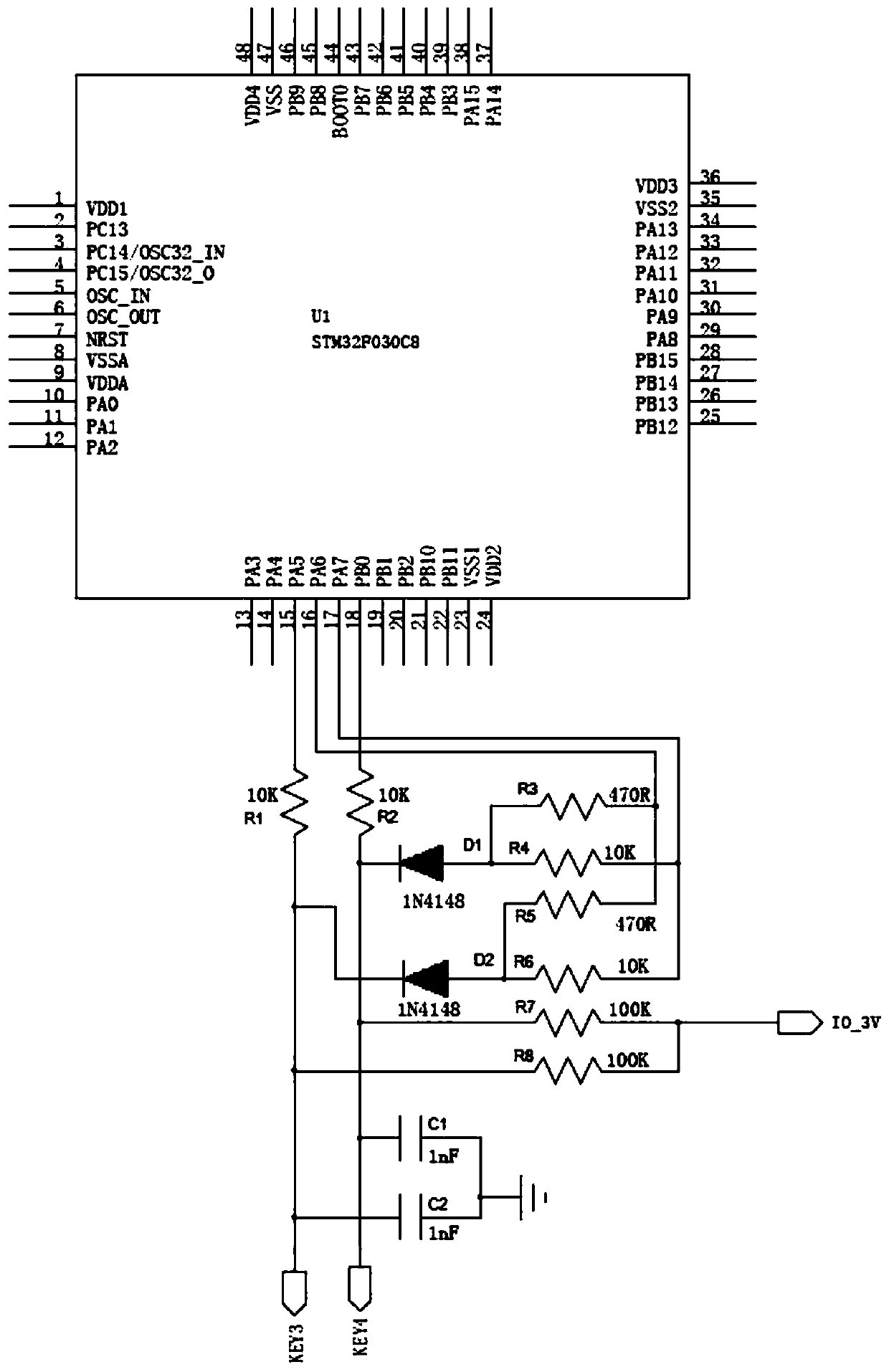
[0047] Example one, reference figure 1 , Is a circuit for self-adaptive learning of the vehicle navigation MCU, which is disclosed in the present invention, which includes a sampling chip coupled to the steering wheel of the square control, a diode coupled to the sampling chip, and three precision resistors. Among them, the sampling chip uses STM32F030C8 microcontroller, and the resistance values of the precision resistors are 470R, 10K, and 100K respectively. When performing square control learning, press the square control button, and through the setting of three precision resistors and the built-in resistance of the button, four groups of different resistance values and four groups of voltage values after voltage division are obtained.
[0048] Specifically, there are generally two button connection lines on the side-controlled steering wheel, which are connected to the KEY3 and KEY4 lines respectively, and collect the button voltage on the side-controlled steering wheel ...
Embodiment 2
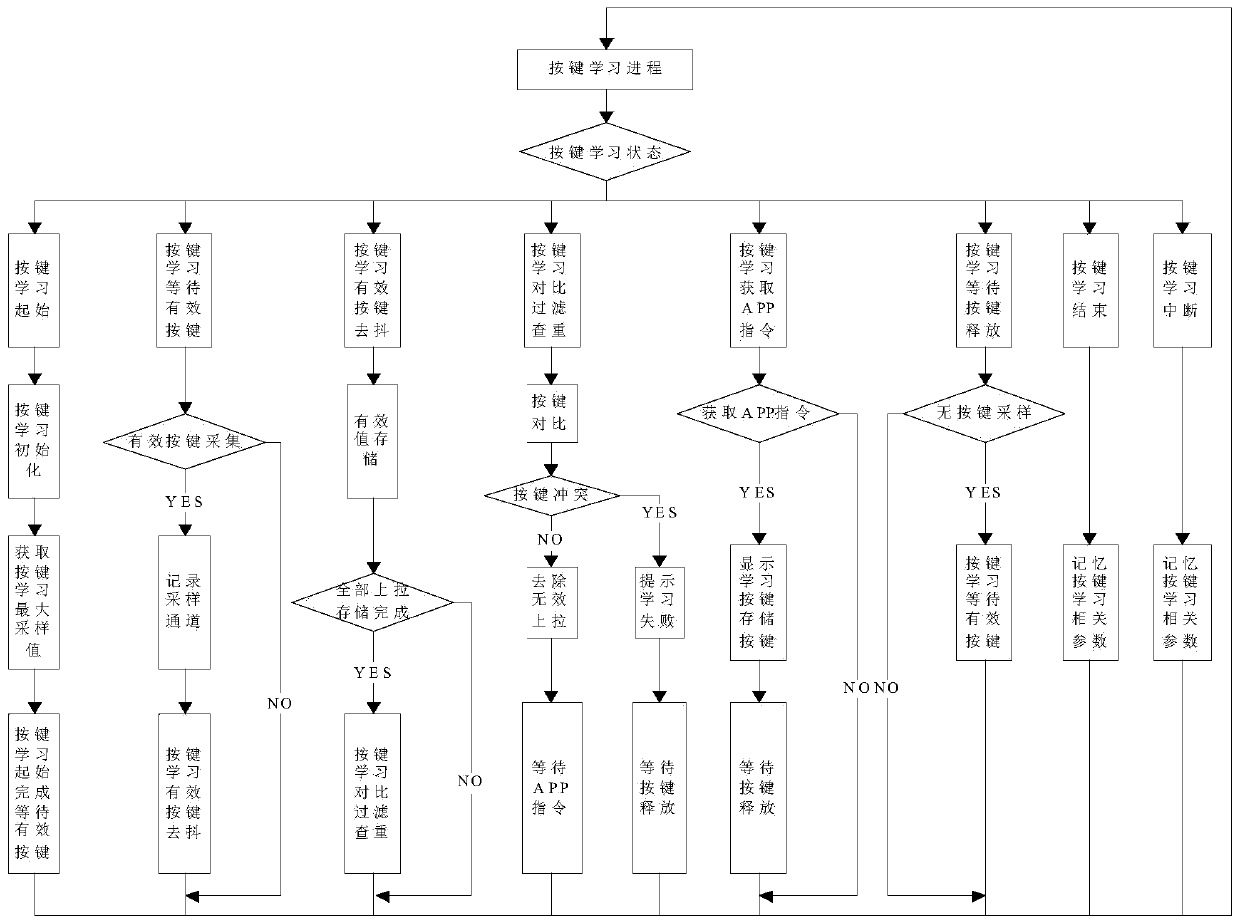
[0054] Example two, reference figure 2 , Is a method for self-adaptive learning of vehicle navigation mcu, which is disclosed in the present invention, includes a vehicle navigation module and a square control steering wheel, and includes the following steps:
[0055] S1. Turn on the car navigation module, enter the button learning state, select the party control button to be learned, and initialize the party control button;
[0056] S2. Long press the initialized square control button without releasing the square control button to obtain multiple sets of sampling resistance values and sampling voltage values corresponding to the sampling resistance values;
[0057] S3. Store each group of sampling resistance values and corresponding sampling voltage values;
[0058] S4. Compare each group of sampled voltage values with the existing square control button voltage values to determine whether there is a button conflict, if yes, go to the next step, if not, go to S6;
[0059] S5....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com