

Multi-maneuvering target tracking method based on depth deterministic strategy gradient DDPG
A maneuvering target tracking and deterministic technology, applied in the field of target tracking, can solve the problem of not considering the impact of target tracking performance, and achieve the effect of solving model-free and Markov decision-making problems, improving tracking accuracy, and high tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in further detail below in conjunction with specific examples, but the embodiments of the present invention are not limited thereto.
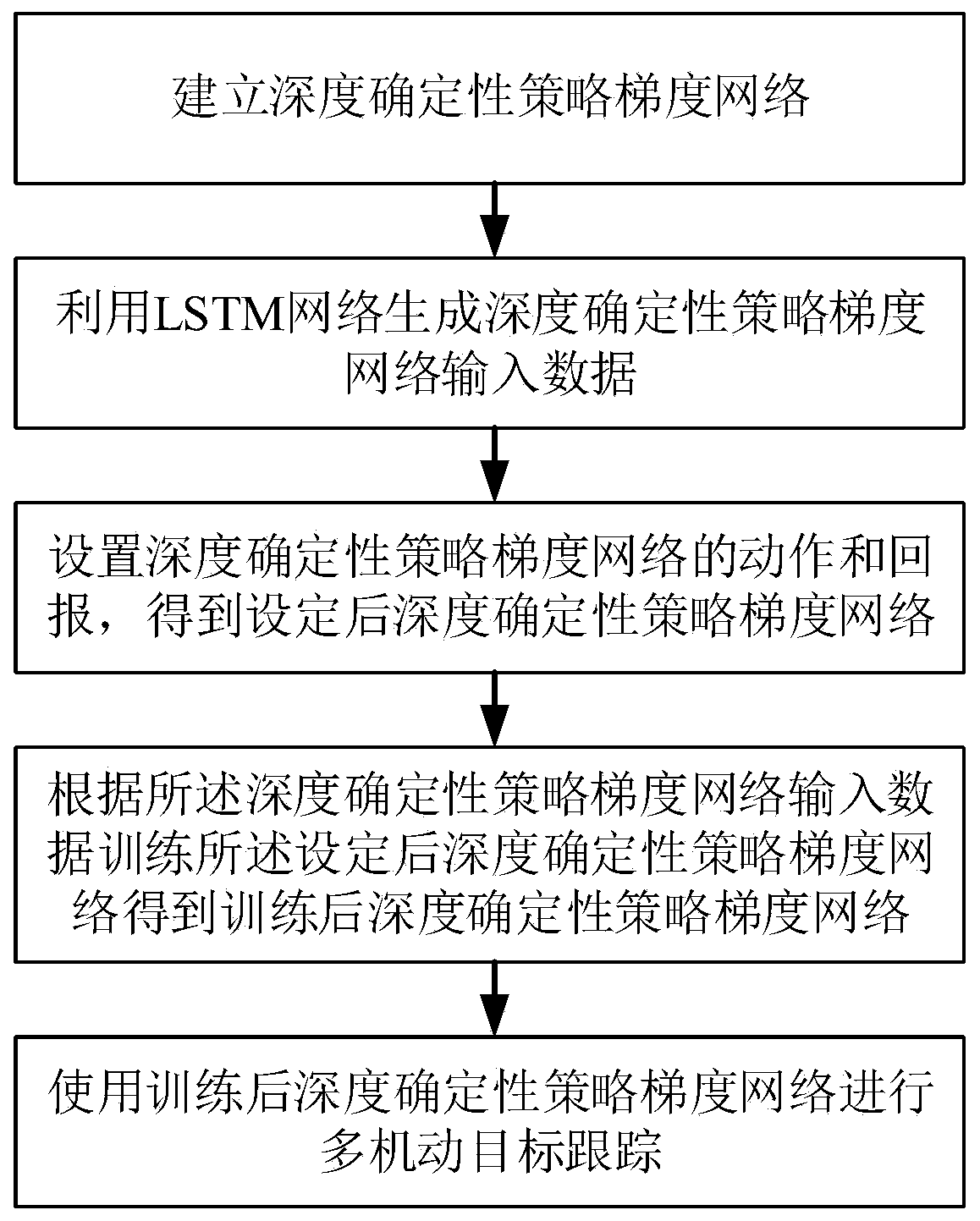
[0049] See figure 1 , figure 1 It is a flow chart of a multi-maneuvering target tracking method based on deep deterministic policy gradient DDPG provided by an embodiment of the present invention, including:
[0050] Build a deep deterministic policy gradient network;
[0051] Generate deep deterministic policy gradient network input data s using LSTM network k ;
[0052] Set the actions and rewards of the deep deterministic policy gradient network, and get the set deep deterministic policy gradient network;
[0053] Input data s according to the deep deterministic policy gradient network k training the set deep deterministic policy gradient network to obtain the trained deep deterministic policy gradient network;
[0054] Multi-Maneuvering Target Tracking Using Trained Deep Deterministic Pol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More