

Walking aid parallel robot
A robot and parallel technology, which is applied in the direction of equipment to help people walk, physical therapy, etc., can solve the problems of user assistance, discomfort for patients with lower limb motor dysfunction, etc., and achieve the effect of safety protection, friendly use experience, and light weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
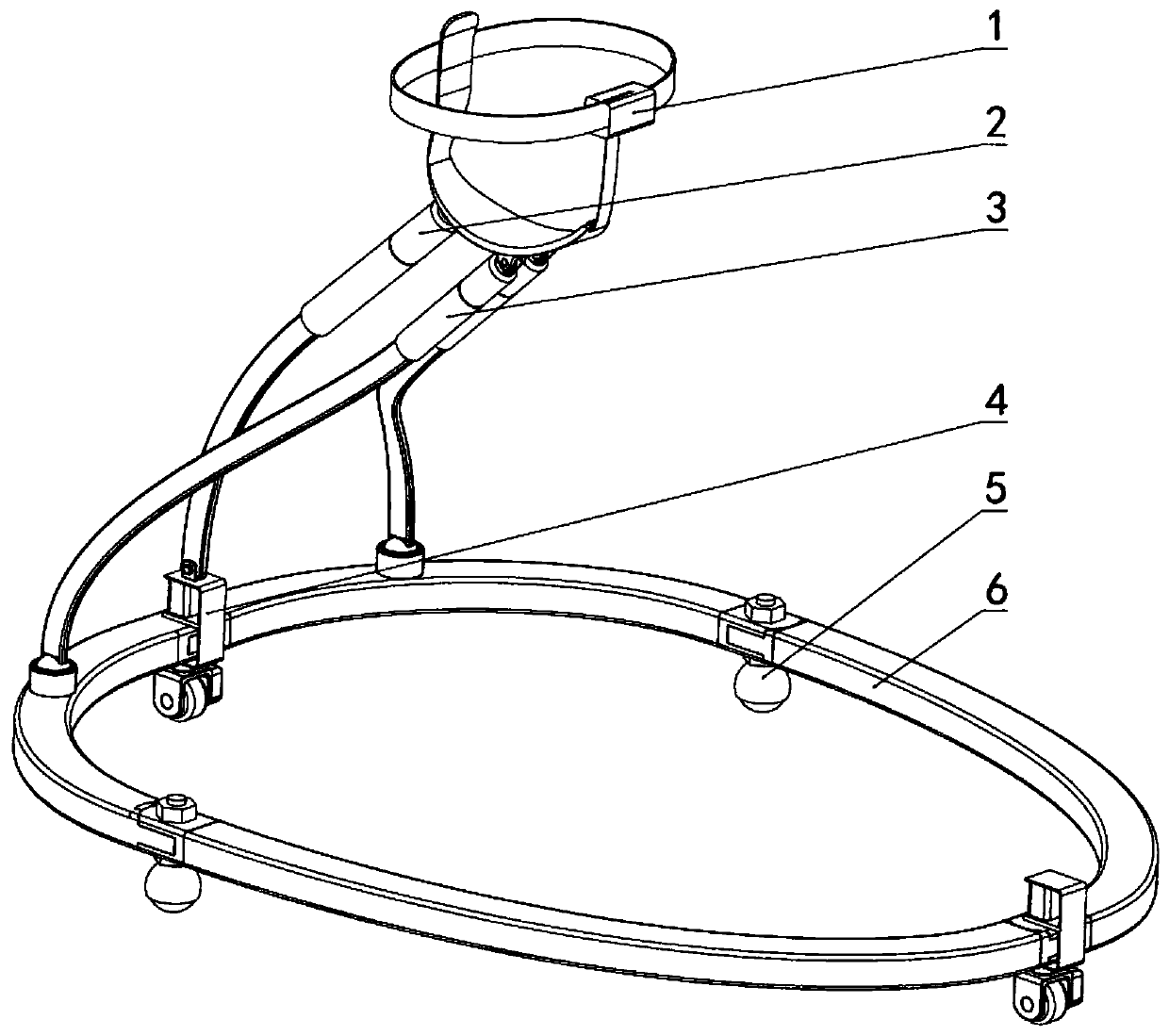
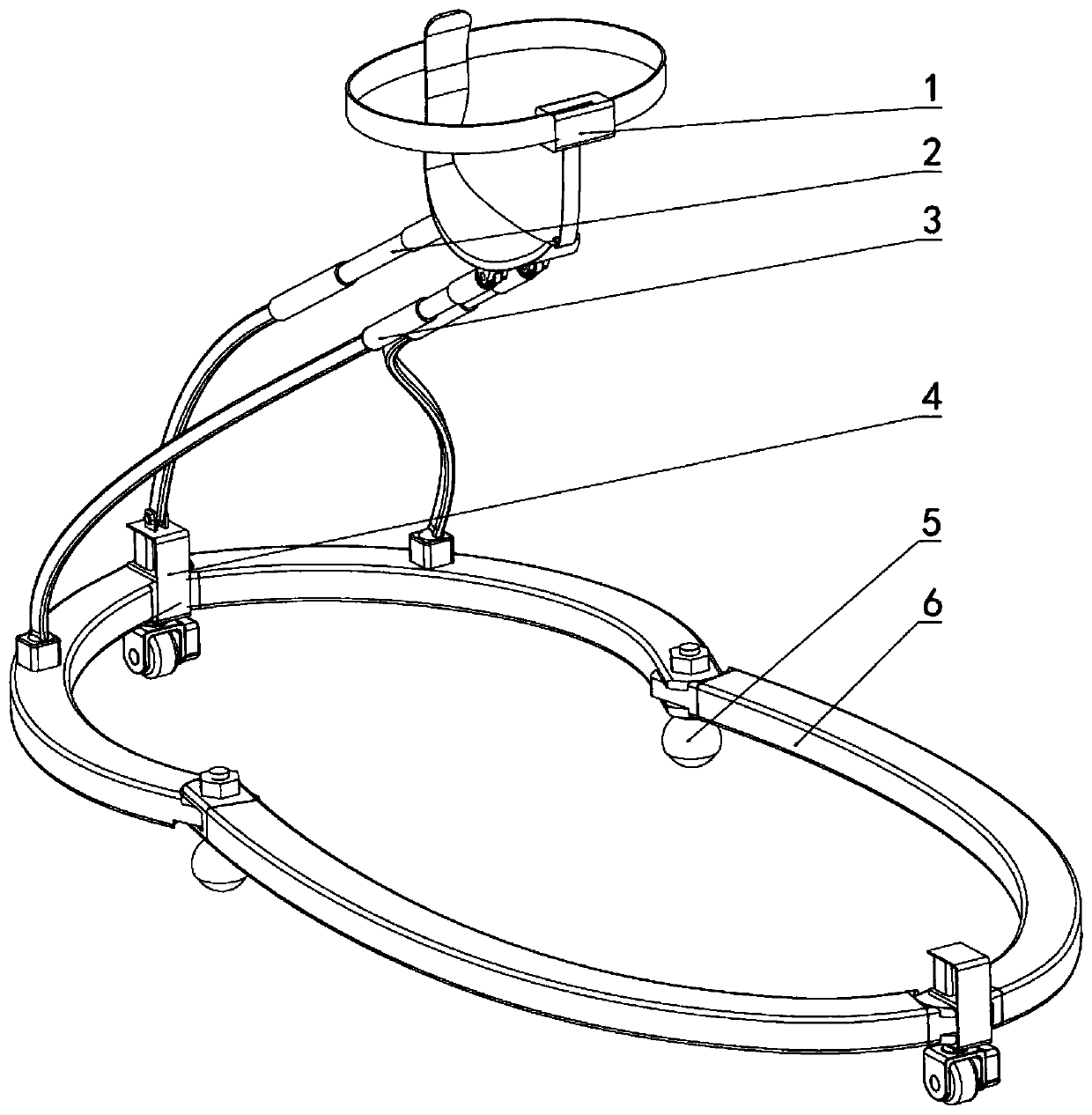
[0025] Such as figure 1 and figure 2 As shown, a walking-assisting parallel robot includes a saddle device 1 , a main strut device 2 , an auxiliary strut device 3 , a driving wheel device 4 , a follower wheel device 5 , and a chassis device 6 . The three-point position on the bottom surface of the saddle device 1 is fixedly connected with the upper ends of the main strut device 2 and the two auxiliary strut devices 3, and the lower end of the main strut device 2 is fixed on the driving wheel device 4; the two auxiliary strut devices 3 The lower ends are respectively welded and fixed to corresponding positions in the chassis device 6; two sets of drive wheel devices 4 and two groups of follower wheel devices 5 are respectively fixed at the front, rear and left and right joint positions of the chassis device 6, dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More