

A wearable fingertip force feedback device
A feedback device and finger cot technology, applied in the field of force feedback, can solve the problem of limited range of force feedback
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
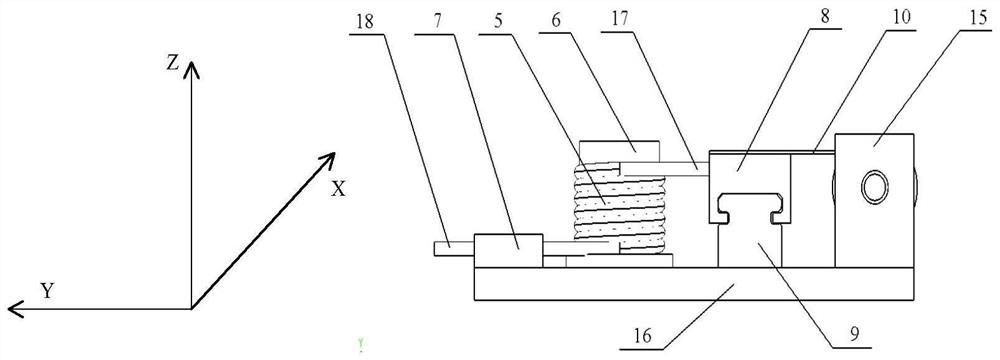
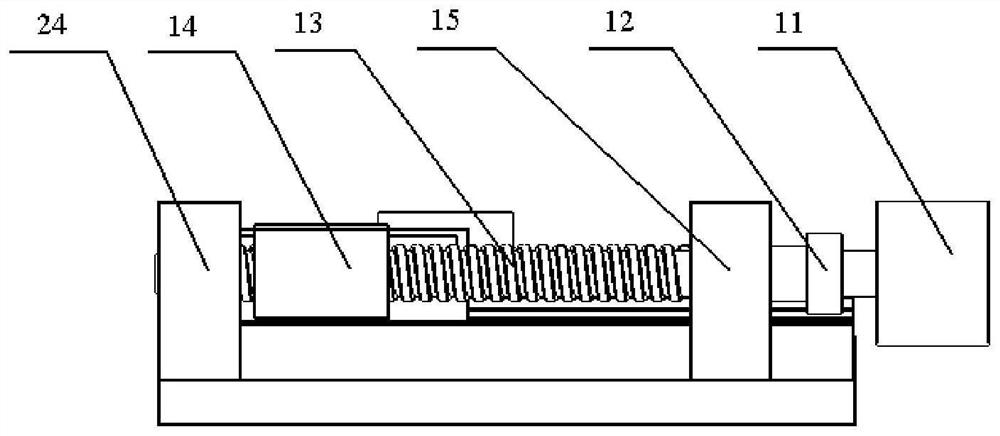
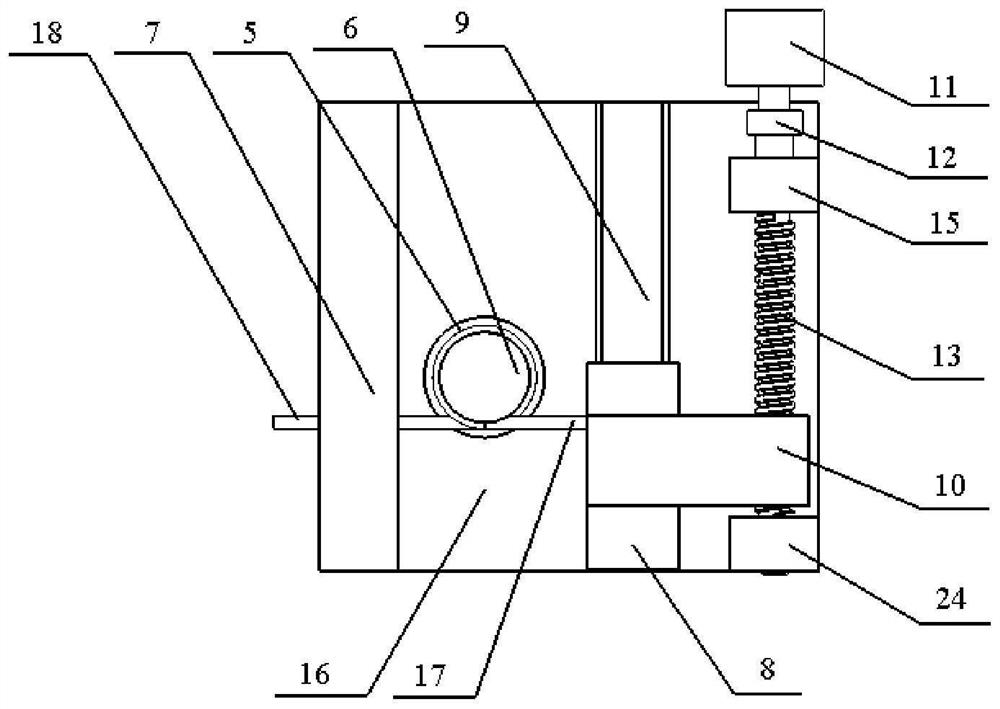
[0024] Such as Figure 1-15 As shown, a wearable fingertip force feedback device includes: Velcro 1, a first finger ring 19, a second finger ring 20, a finger cot 2, a string 4, a torsion spring 5, a torsion spring shaft 6, and a baffle 7 , slider 8, guide rail 9, transition plate 10, motor 11, coupling 12, lead screw 13, nut 14, first lead screw support 15, second lead screw support 24, base 16, the Velcro 1 Felt 3 is attached to the front and back of the front and back, and elastic bands are installed inside. The first finger ring 19, the second finger ring 20, and the finger cot 2 are successively installed on the proximal joint 21, middle joint 22, and distal joint 23 of the finger, and the first The finger ring 19, the second finger ring 20, and the finger ring 2 are all provided with a string 4 through holes, and one end of the string 4 links to each other with a torsion arm 18 of the torsion spring 5, and the other end passes through the first finger ring 19 and the sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More