

Unmanned ship global path planning method based on improved A star algorithm
A technology for global path planning and unmanned boats, applied in navigation calculation tools, two-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve problems such as unmanned boat self-propelled technology needs to be improved, and achieve Avoid path uncertainty and jitter phenomena, reduce the effect of path nodes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
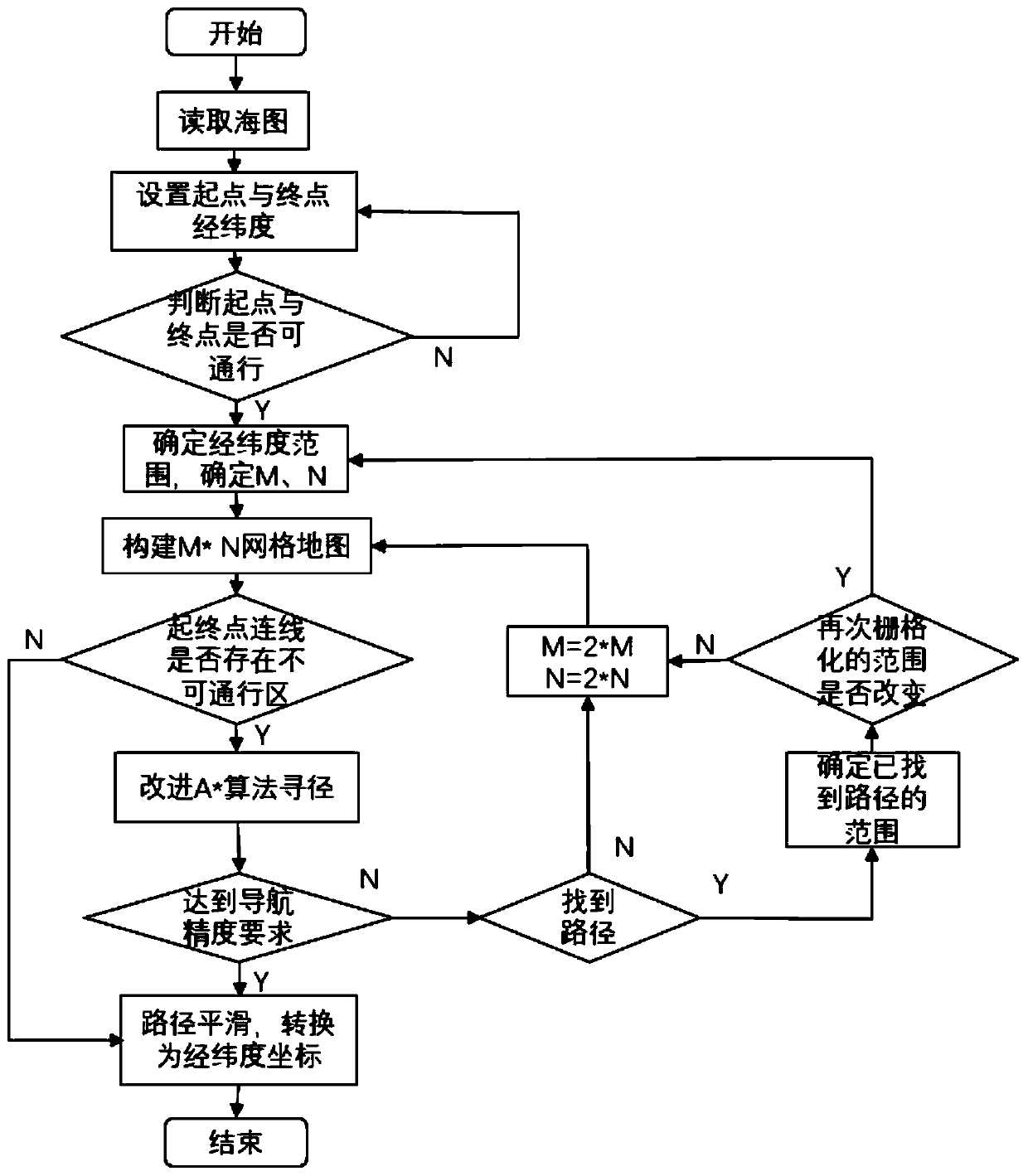
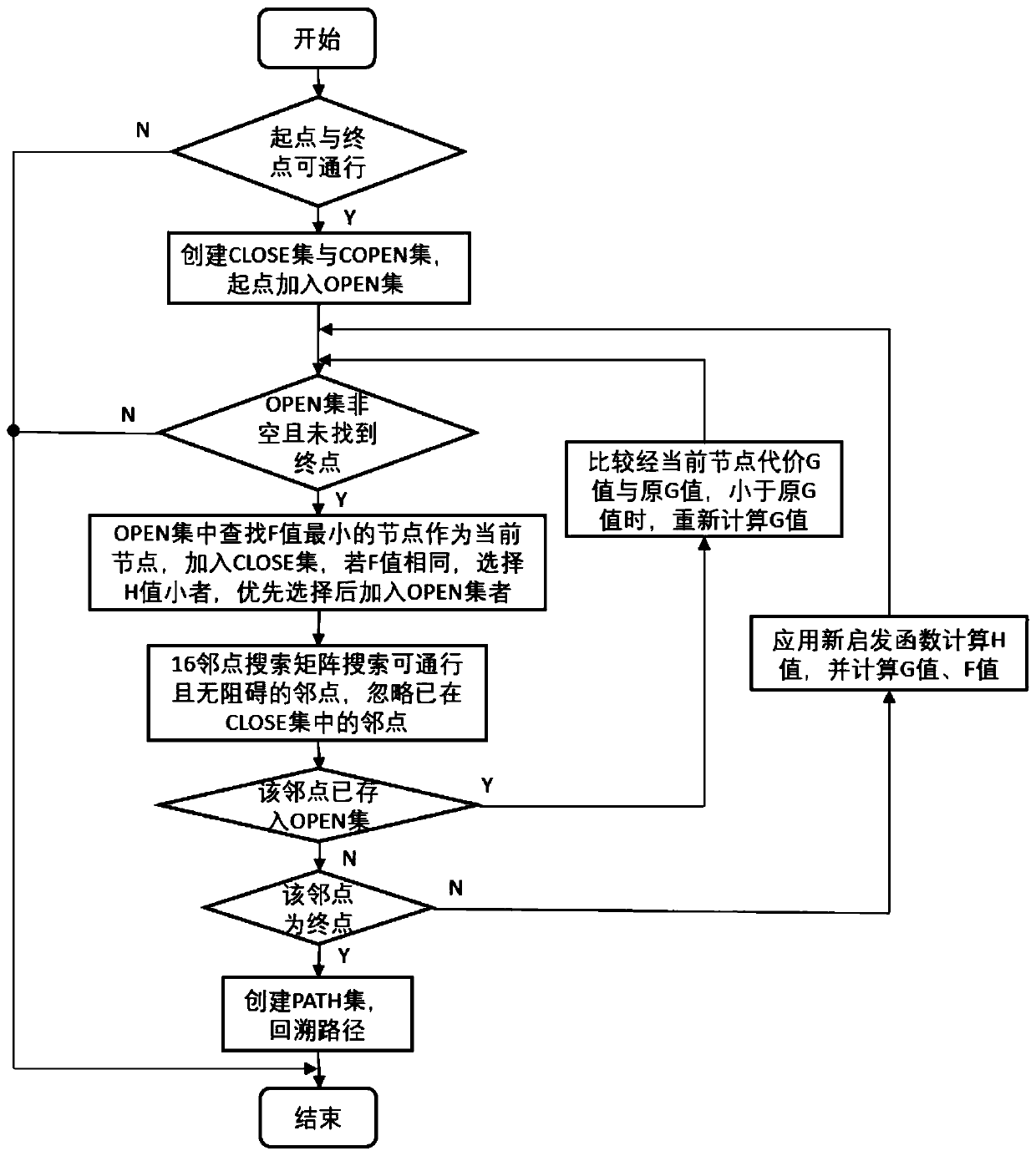
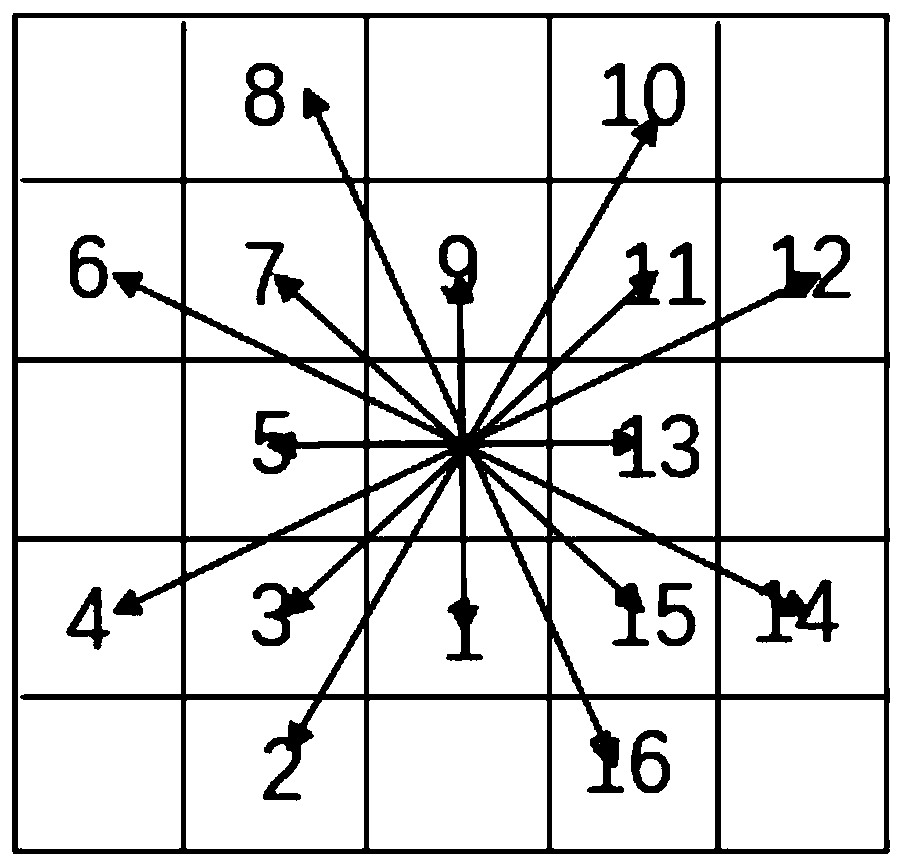
[0025] The present invention provides a global path planning method for unmanned boats based on the improved A-star algorithm. The present invention changes the traditional A-star algorithm neighbor search strategy, expands the search neighborhood, improves the traditional heuristic function, combines the decentralization strategy, and adds The angle factor makes the results obtained during path search biased and distributed near the line connecting the starting point and the target point, improving the search efficiency. The invention uses electronic charts to obtain marine geographic information, combines the improved A-star algorithm with the dynamic grid method, builds a grid map model through grid dynamic refinement, uses the improved A-star algorithm to find the path, and makes the path accuracy gradually meet the accuracy requirements , a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More