Automobile driving obstacle detection method and system based on multiple laser radars
A technology of obstacle detection and laser radar, which is applied in the field of multi-lidar car driving obstacle detection, can solve the problems of long computing time and inability to provide support, and achieve the effect of reducing the cost of use and improving the detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
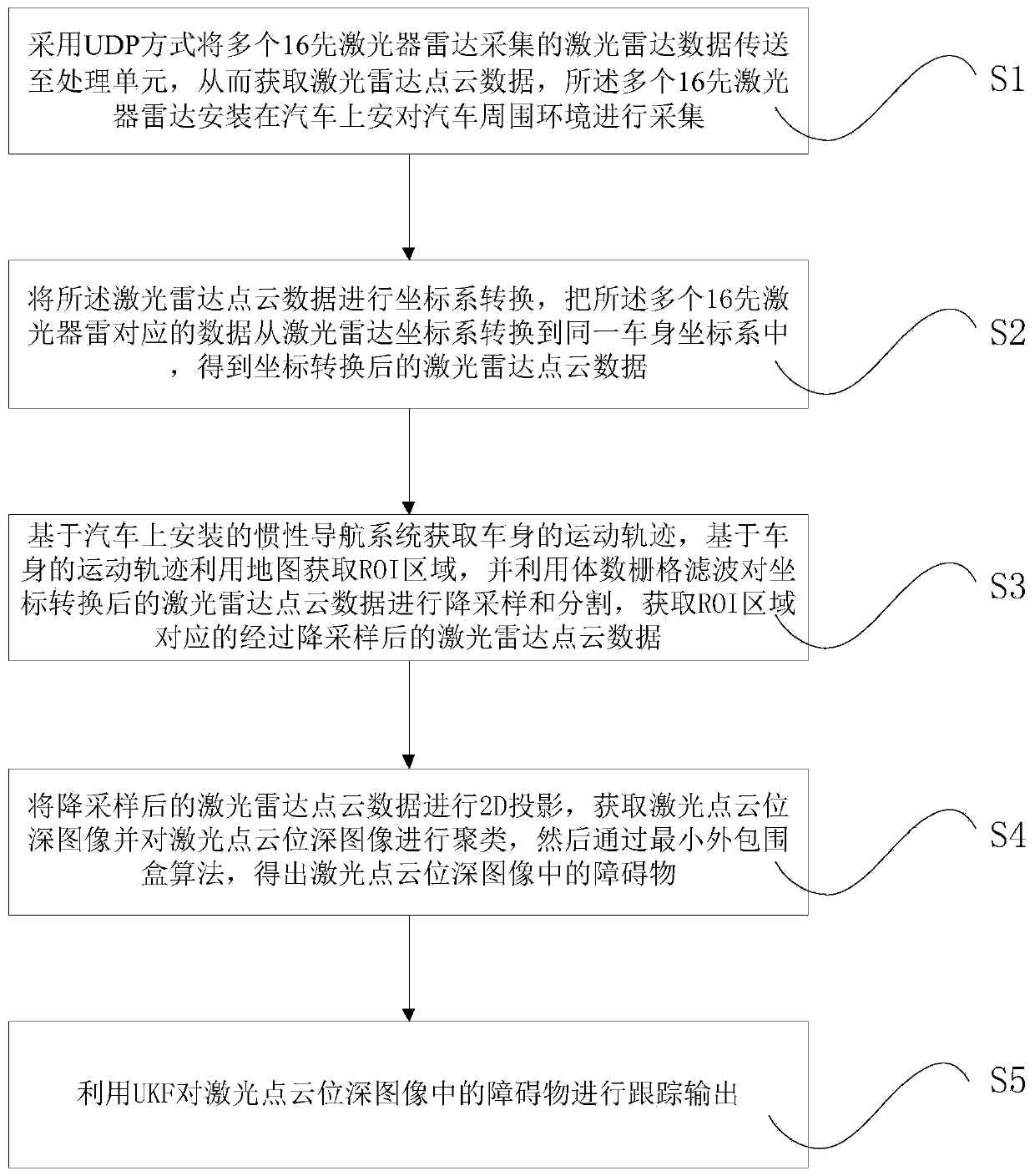
[0034] refer to figure 1 , figure 1 It is a flowchart of an embodiment of the multi-lidar vehicle driving obstacle detection method of the present invention. The car driving obstacle detection method of the multi-lidar of the present embodiment comprises the following steps:
[0035] S1. Using UDP to transmit the laser radar data collected by a plurality of 16-channel laser radars to the processing unit, thereby obtaining laser radar point cloud data, the multiple 16-channel laser radars are installed on the car to collect the surrounding environment of the car; When transmitting data to the processing unit in UDP mode, multiple UDP data packets are included in one frame of point cloud data packet. The data in each UD...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com