

Four-degree-of-freedom hip joint exoskeleton walking aid robot based on flexible driving
A walking-assist robot and a degree of freedom technology, applied in the field of robotics, can solve the problems of the exoskeleton drive part being bulky, unsuitable for walking, complex structure, etc., and achieve the effect of avoiding rigid collision, strong versatility, and reduced interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
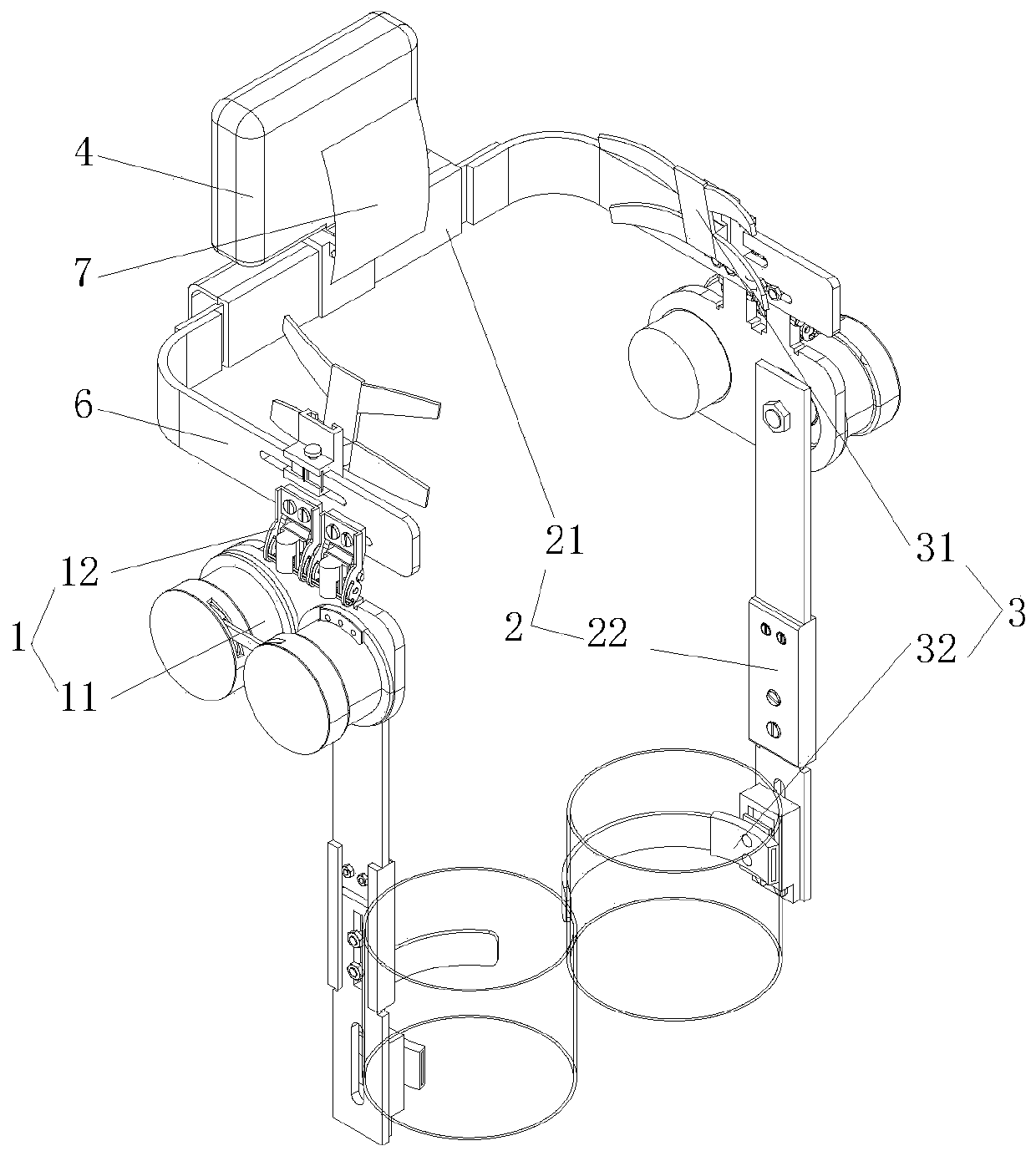
[0055] see figure 1 , a four-degree-of-freedom hip exoskeleton walking-assisted robot based on flexible drive, including a four-degree-of-freedom joint configuration module 1, a size adjustment module 2, a human-computer interaction module 3, a sensing system module 4 and a belt plate 6.
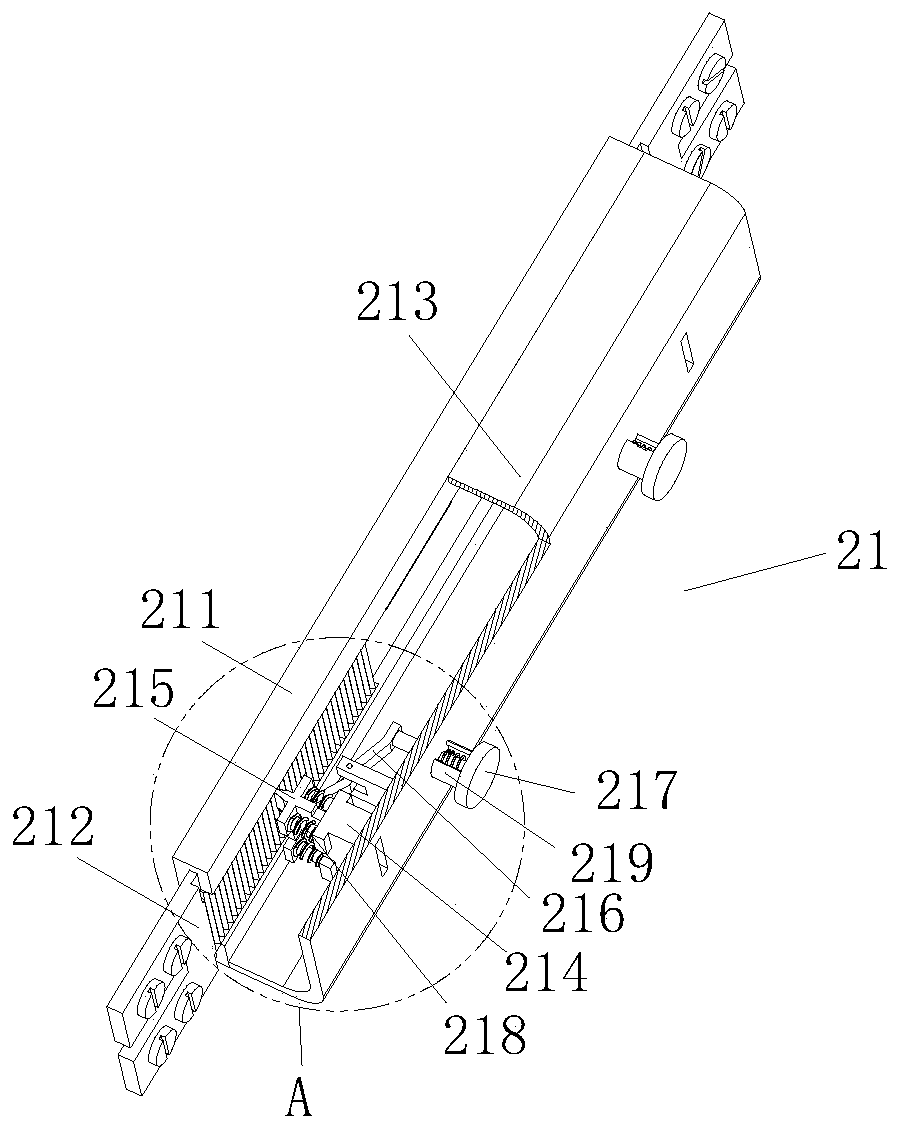
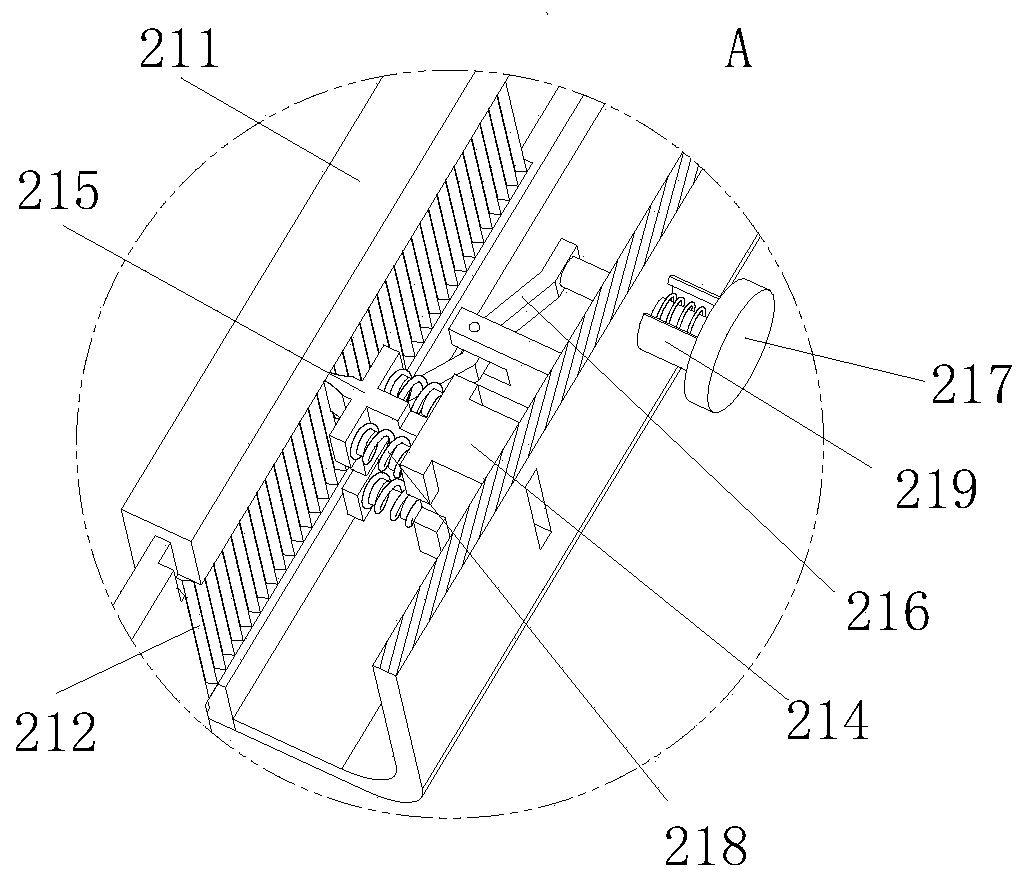
[0056] The size adjustment module 2 includes a waist adjustment mechanism 21 and a leg adjustment mechanism 22, which are used to adapt to the difference in body shape. Such as figure 2 with image 3 As shown, the waist adjustment mechanism 21 includes a backboard 211 , a slotted plate 212 slidably embedded in the backboard 211 , and a support shell 213 fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More