

Intelligent mechanical arm obstacle avoidance method and system for human-computer safety interaction and robot
A technology of intelligent obstacle avoidance and robotic arm, which is applied in the direction of manipulators, general control systems, program-controlled manipulators, etc., can solve problems such as inability to respond in a timely and effective manner, high dependence, and long calculation time, and achieve fast planning speed and improved accuracy degree, the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] In order to combine the coordination and cognitive judgment ability of humans with the advantages of precision and repetitive work of the robotic arm, the robotic arm needs to share the workspace with humans and should have the ability to work side by side with human colleagues, which determines the robotic arm. It must be able to respond to changes in the environment, and can make intelligent and effective obstacle avoidance measures according to the movement state of human body movements to ensure human-machine safety.
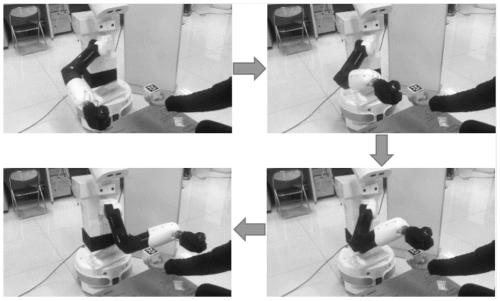
[0038] Embodiment 1 of the present disclosure provides a method for intelligent obstacle avoidance of a manipulator oriented to human-computer security interaction. The robot monitors the two-dimensional code on the human arm in real time through the two-dimensional code visual positioning technology (such as figure 1 shown), and then calculate the motion state of the human body through the results and changes of the obstacle position detection. The ob...
Embodiment 2
[0061] Embodiment 2 of the present disclosure provides a robot arm intelligent obstacle avoidance system oriented to human-computer safety interaction, including a robot with a robot arm and an obstacle posted with a two-dimensional code. The robot uses embodiment 1 of the present disclosure The intelligent obstacle avoidance method of the manipulator oriented to human-computer safety interaction performs obstacle avoidance.
Embodiment 3
[0063] Embodiment 3 of the present disclosure provides a robot oriented to human-computer safety interaction, and the robot avoids obstacles by using the intelligent obstacle avoidance method of a manipulator oriented to human-computer safety interaction described in Embodiment 1 of the present disclosure.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More