

An active fault-tolerant control method for unmanned aerial vehicles based on reinforcement learning
A technology of reinforcement learning and fault-tolerant control, which is applied in non-electric variable control, attitude control, control/regulation systems, etc., can solve the problems of poor fault-tolerant effect, fault-tolerant control effect, and the influence of mathematical modeling accuracy, etc., to achieve fast online Renewal, Enhancement of Data Extraction Features, Effect of Simplified Design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
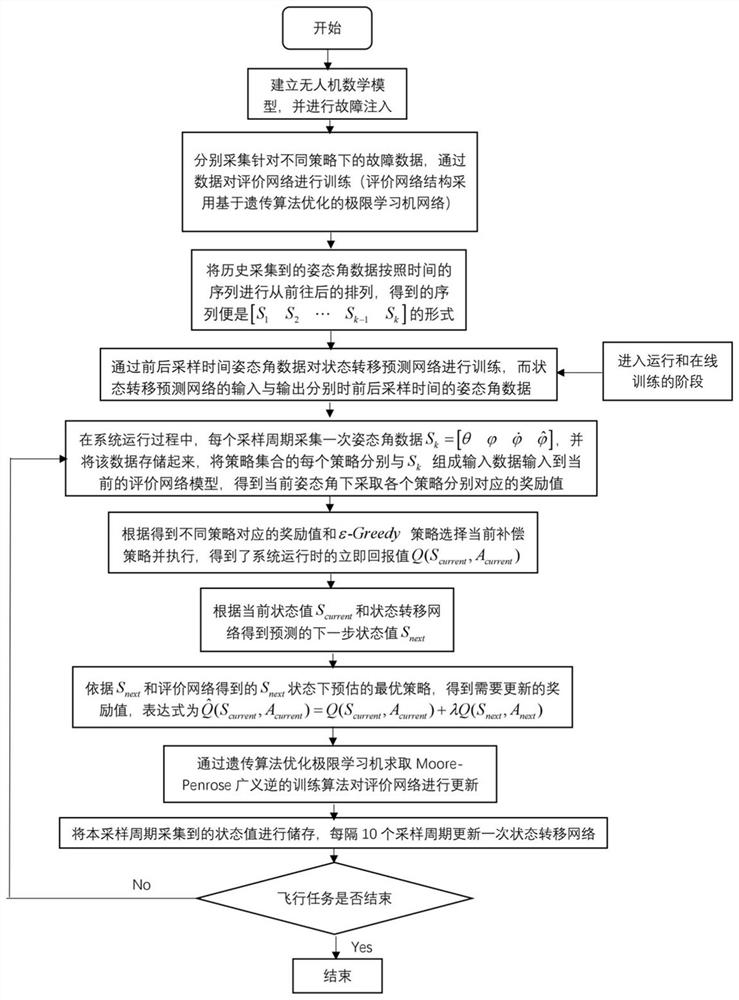
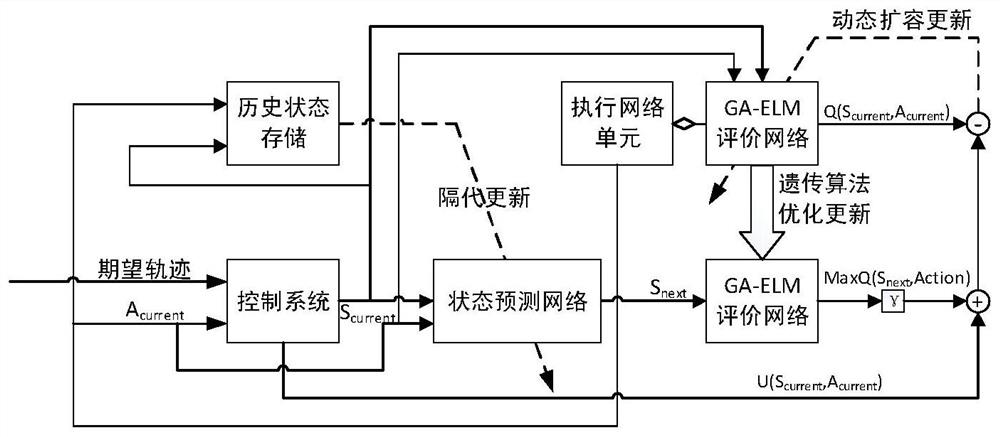
[0044] Such as figure 1 with figure 2 As shown, the present invention is a kind of UAV active fault-tolerant control method based on reinforcement learning, and its steps include:
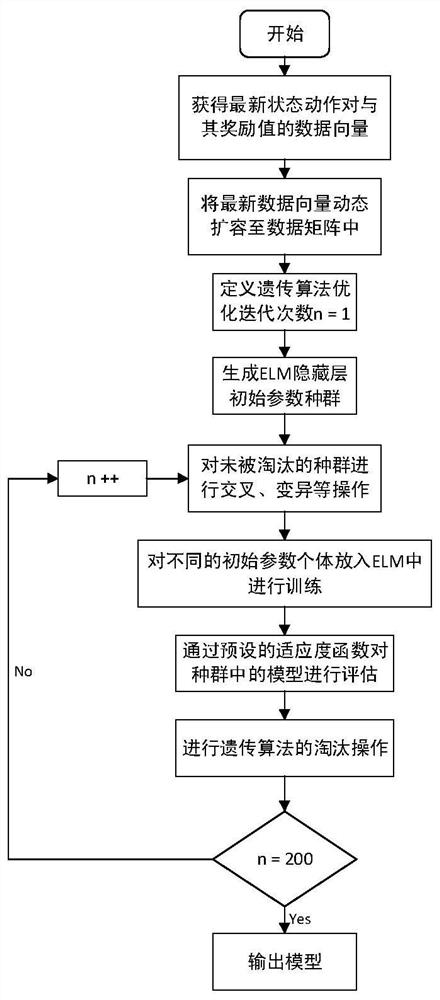
[0045] Step S1, pre-offline training stage: establish the UAV dynamics model, and train and update the evaluation network of the fault-tolerant controller of reinforcement learning by collecting the historical posture generated when the UAV is running and the data output by the controller. The evaluation network is optimized by genetic algorithm to optimize the extreme learning machine, which improves the training speed and training accuracy.
[0046] Step S2, system operation and online tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More