

Automatic-adjustment multifunction wheel-type pipeline robot
A pipeline robot and automatic adjustment technology, applied in special pipes, pipe components, mechanical equipment, etc., can solve the problems of poor obstacle crossing ability, large axial size of pipelines, and limited internal space of pipelines, so as to improve traffic performance and reduce The effect of exercise resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Now in conjunction with the accompanying drawings, the implementation of the wheeled pipeline robot of the present invention will be described in detail.
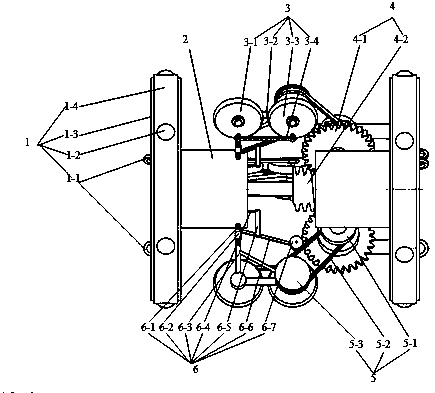
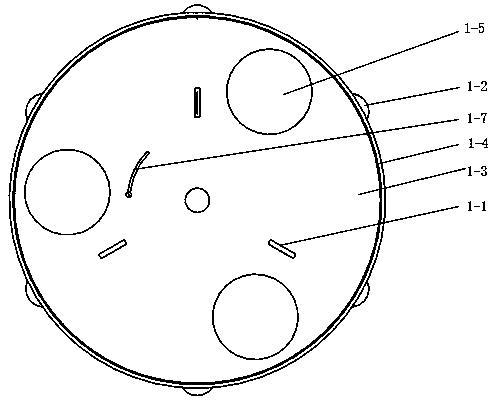
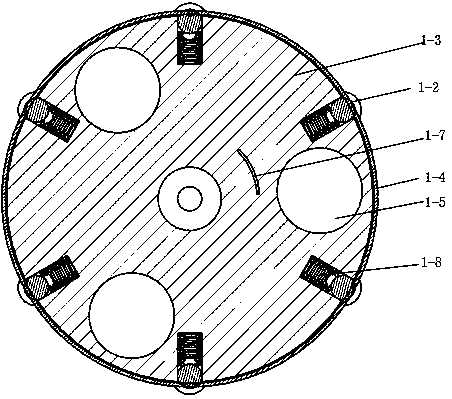
[0020] figure 1 It is a structural schematic diagram of the drive unit of the wheeled pipeline robot of the present invention. The drive unit mainly includes a disc support assembly 1, a motor drive assembly 2, a synchronous roller assembly 3, a worm gear assembly 4, a gear synchronous belt assembly 5 and a roller-tensioner adjustment The adaptive component 6 constitutes. The disc-shaped support components 1 are arranged in pairs in parallel to form the frame of the pipeline robot to support the entire pipeline robot, and its internal specific structure is composed of figure 2 give. When energized, the motor 2-1 drives the worm 4-2 to rotate through the coupling 2-2, and the worm 4-2 transmits the kinetic energy generated by the motor to the three worm gears 4-1 meshed with it, and the three worm gears 4- 1. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More