

Carrying manipulator and carrying robot
A technology for handling robots and manipulators, which is applied in the field of construction machinery and can solve the problems of falling bricks, high labor intensity and affecting work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to facilitate the understanding of the present invention, the present invention will be described more fully below with reference to the associated drawings. Preferred embodiments of the invention are shown in the accompanying drawings. However, the present invention can be embodied in many different forms and is not limited to the embodiments described herein. On the contrary, these embodiments are provided to make the understanding of the disclosure of the present invention more thorough and comprehensive.
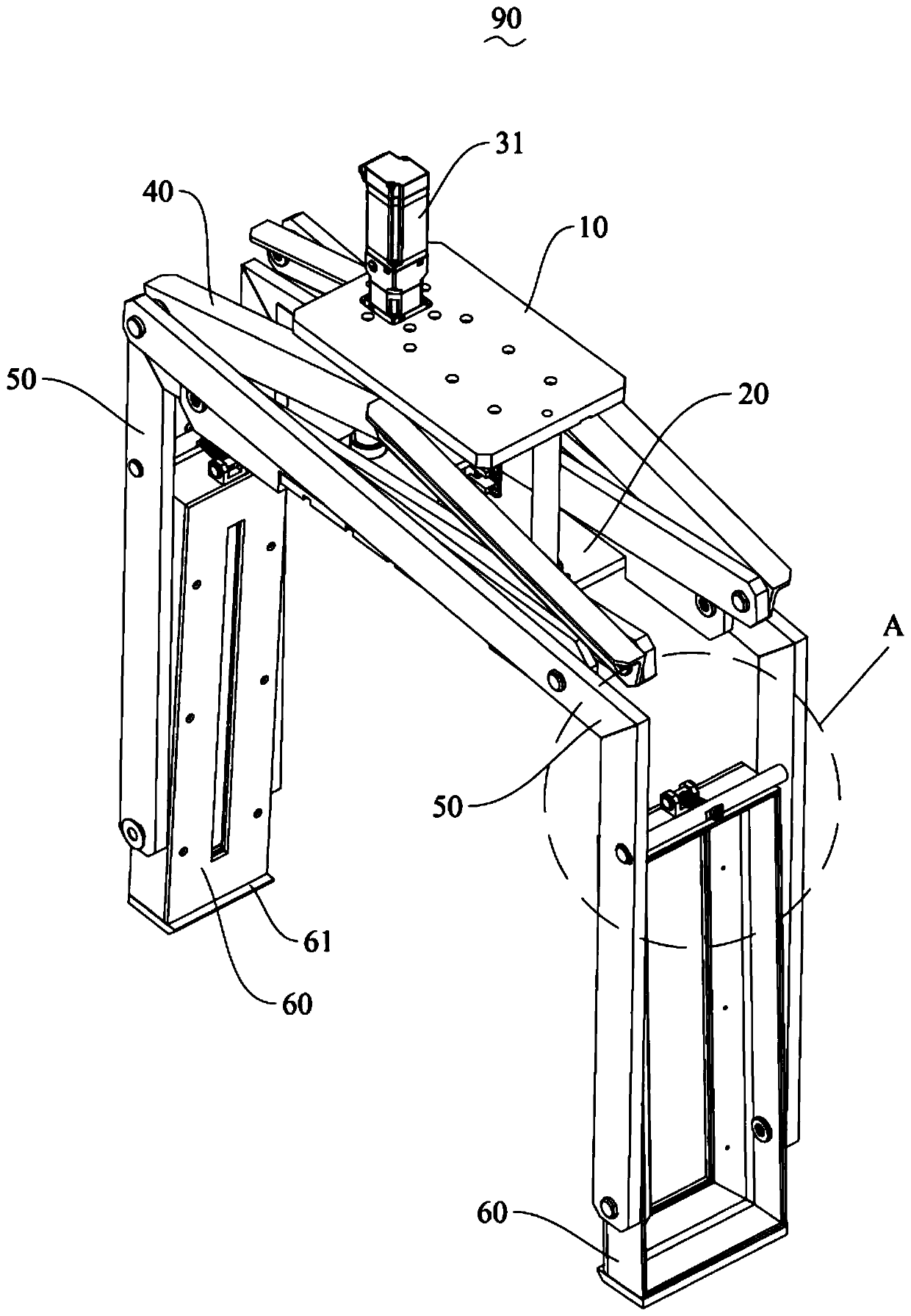
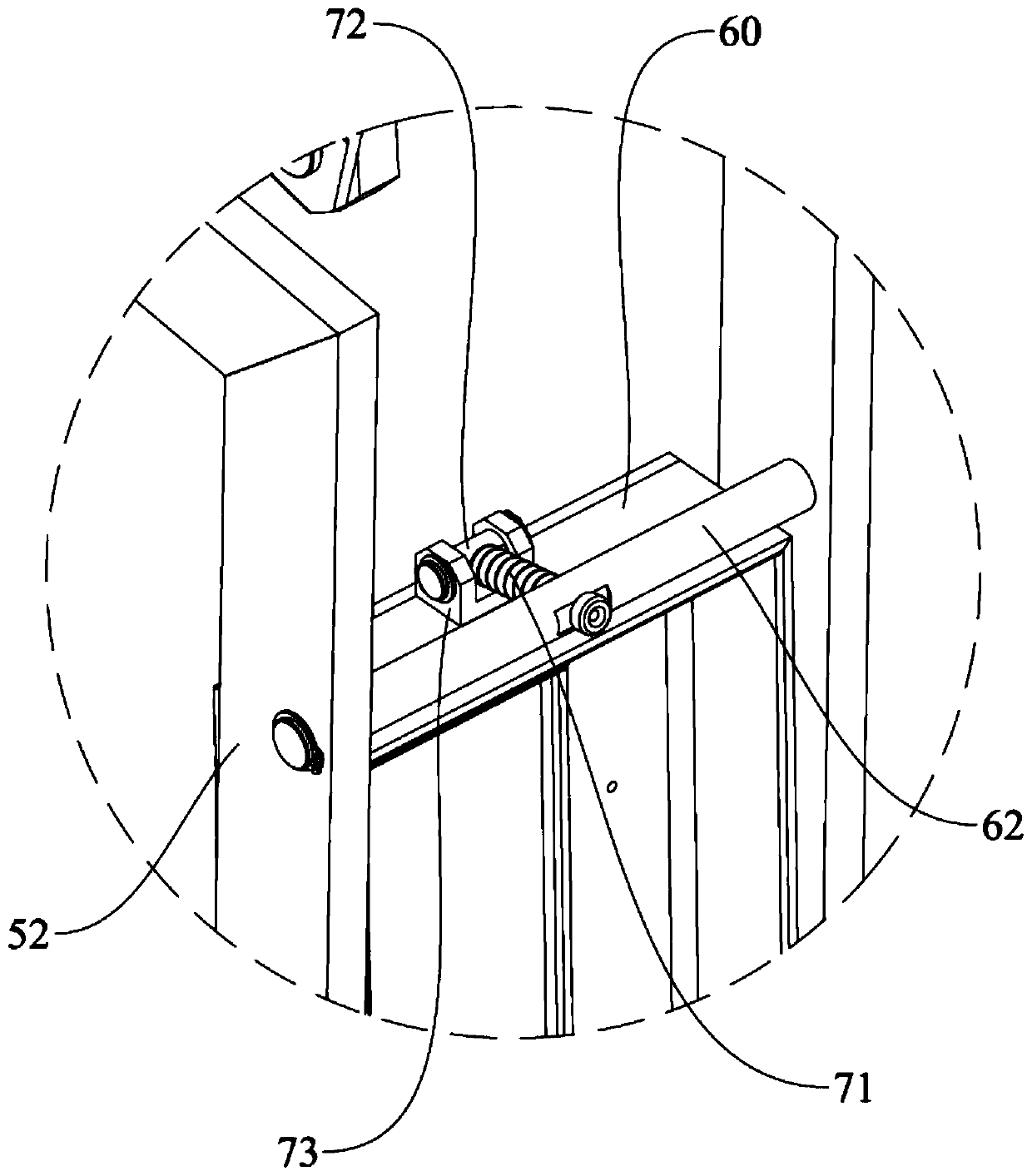
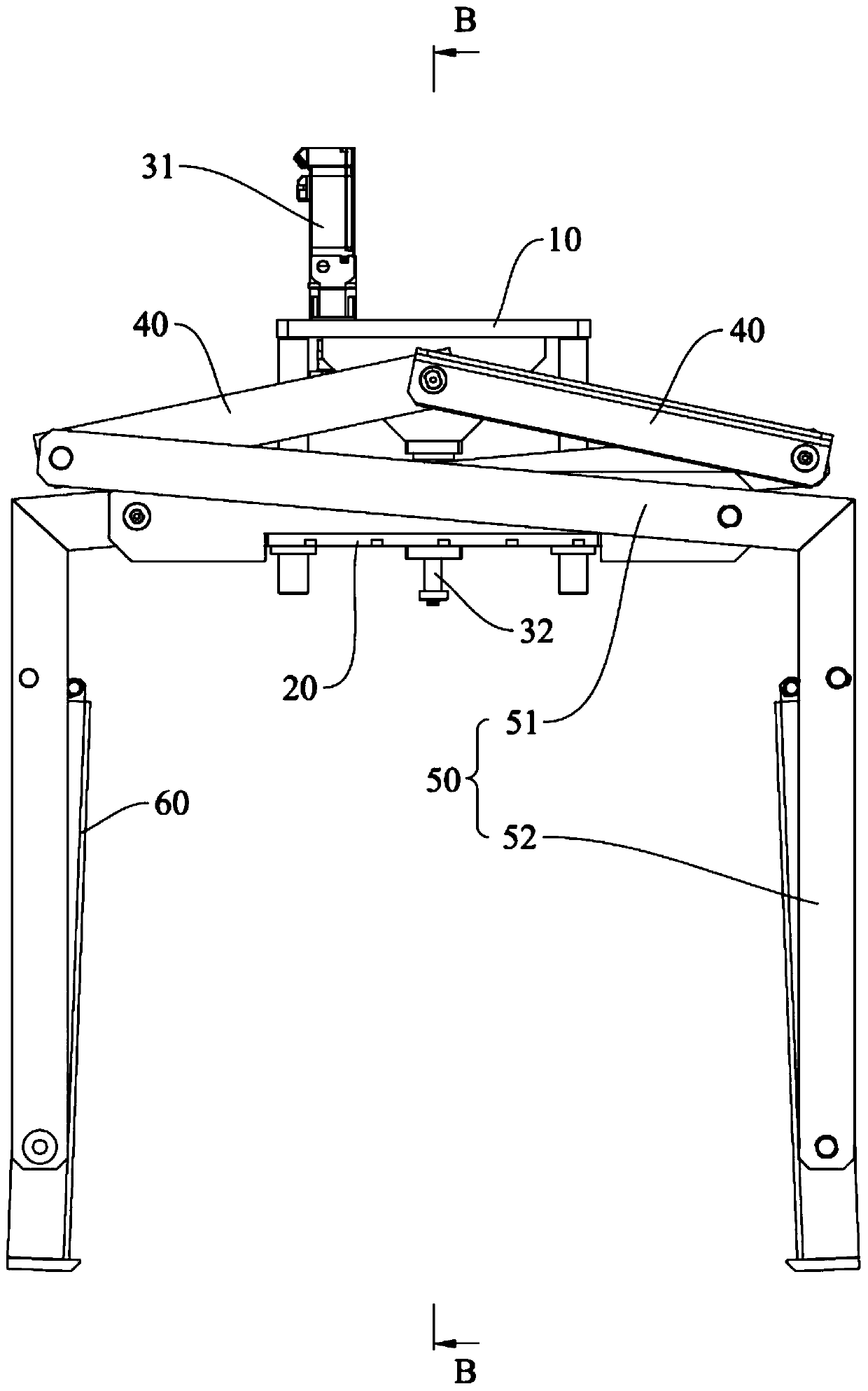
[0057] This embodiment discloses a handling manipulator, such as Figure 1 to Figure 7As shown, the handling manipulator 90 includes a fixed seat 10, a driving mechanism, a movable part 20 and a clamping mechanism, wherein the driving mechanism is arranged on the fixed seat 10; the movable part 20 is connected to the output end of the driving mechanism, and the driving mechanism can drive the movable part 20 lifting; the clamping mechanism includes two ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More