Multi-sensor fusion slam system and robot
A multi-sensor fusion and key-frame technology, applied in the field of robotics, can solve problems such as failure, achieve accurate calculation of pose, improve robustness, and reduce the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. In the following description, the same reference numerals are assigned to the same components, and overlapping descriptions are omitted. In addition, the drawings are only schematic diagrams, and the ratios of the dimensions of the members, the shapes of the members, and the like may be different from the actual ones.
[0028] Embodiments of the present invention relate to a multi-sensor fusion SLAM system and a robot.
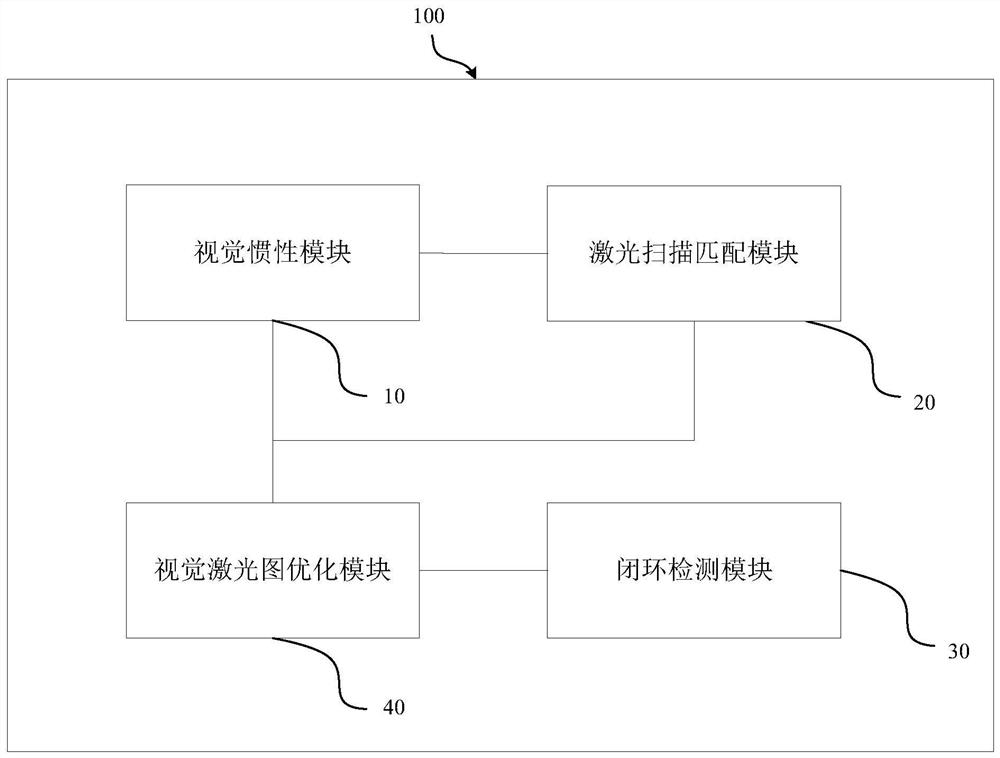
[0029] like figure 1 As shown, the multi-sensor fusion SLAM system 100 operates on a mobile robot. It includes: a visual inertial module 10 , a laser scanning matching module 20 , a closed-loop detection module 30 , and a visual laser map optimization module 40 . The visual inertial module 10 is used for outputting pose information. The laser scanning matching module 20 uses the pose information as an initial value, ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com