

Servo tracking accelerated convergence method for robot visual feature planning track
A technology for robot vision and accelerated convergence, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as loss of important visual information, control interruption, etc., to avoid excessive motion errors, reduce the number of steps, and ensure global convergence Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
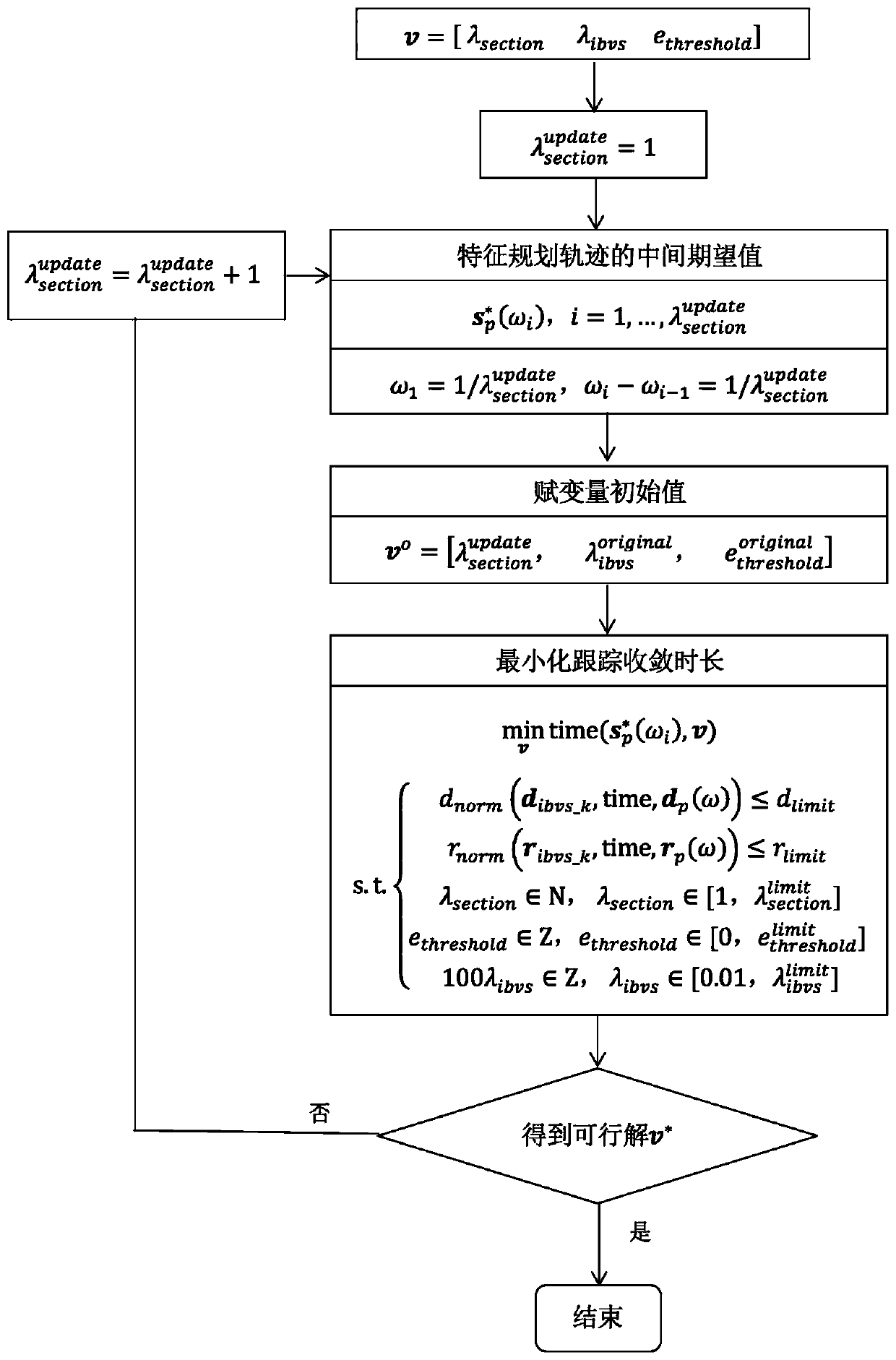
[0037] In this example, if figure 1 As shown, a servo tracking acceleration convergence method for robot visual feature planning trajectory, including planning feature trajectory, optimizing trajectory tracking related parameters, ensuring that the tracking error is not exceeded, and reducing the servo iterations for tracking convergence to the final feature expectation value as much as possible / Number of steps, including the following steps:
[0038] S101, establishing a visual feature trajectory planning model to obtain a specific planned trajectory;
[0039] This step includes establishing the movement path of the camera at the end of the robot, and projecting the target along the way to obtain the planned trajectory of the target visual feature, specifically including th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More