

Multifunctional all-terrain transportation robot
An all-terrain and robotic technology, applied in the field of transportation, can solve the problems of large internal space, poor ability to overcome obstacles, and inaccessibility, and achieve the effects of good maintenance, strong load capacity, and wide application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
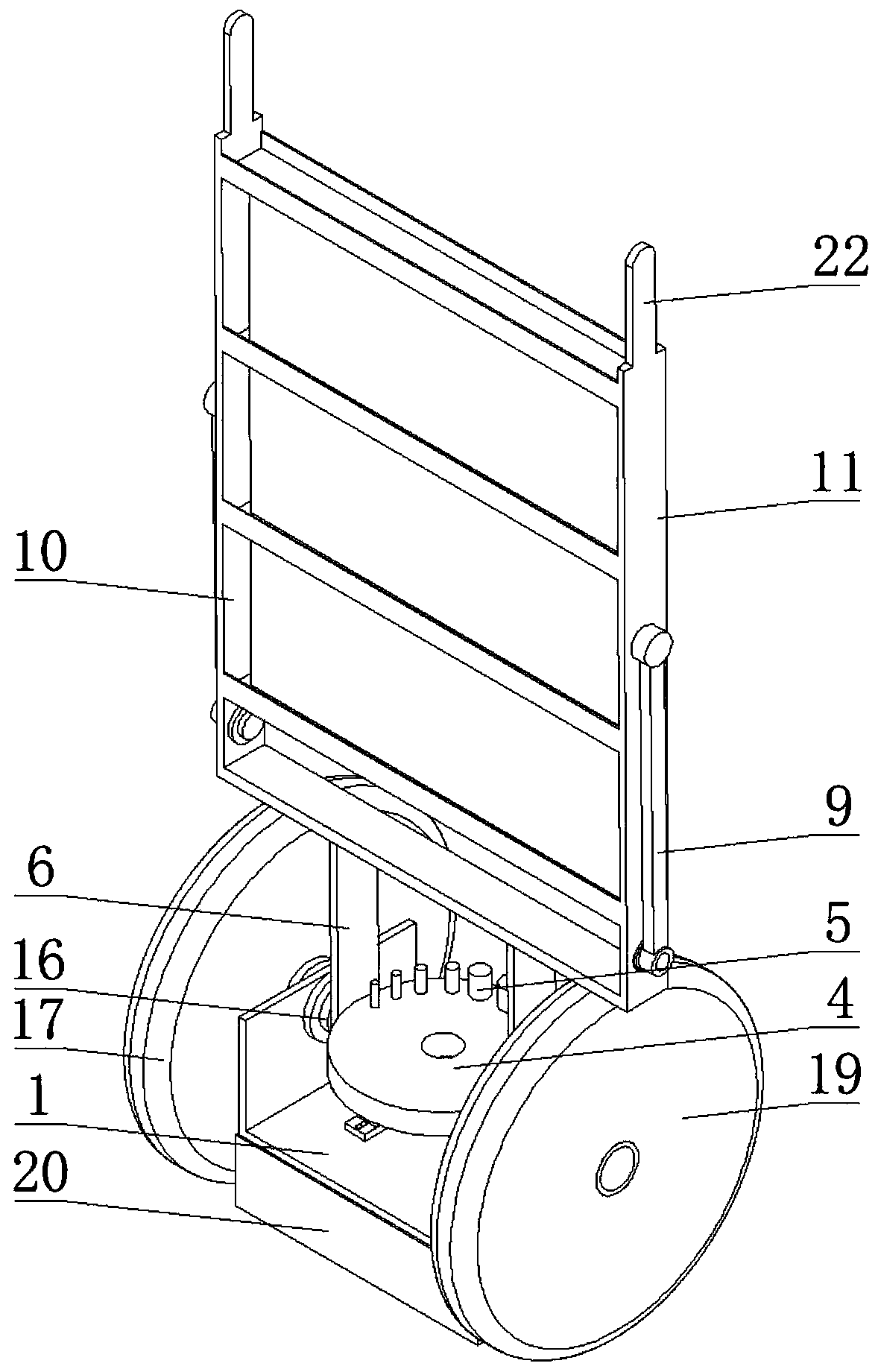
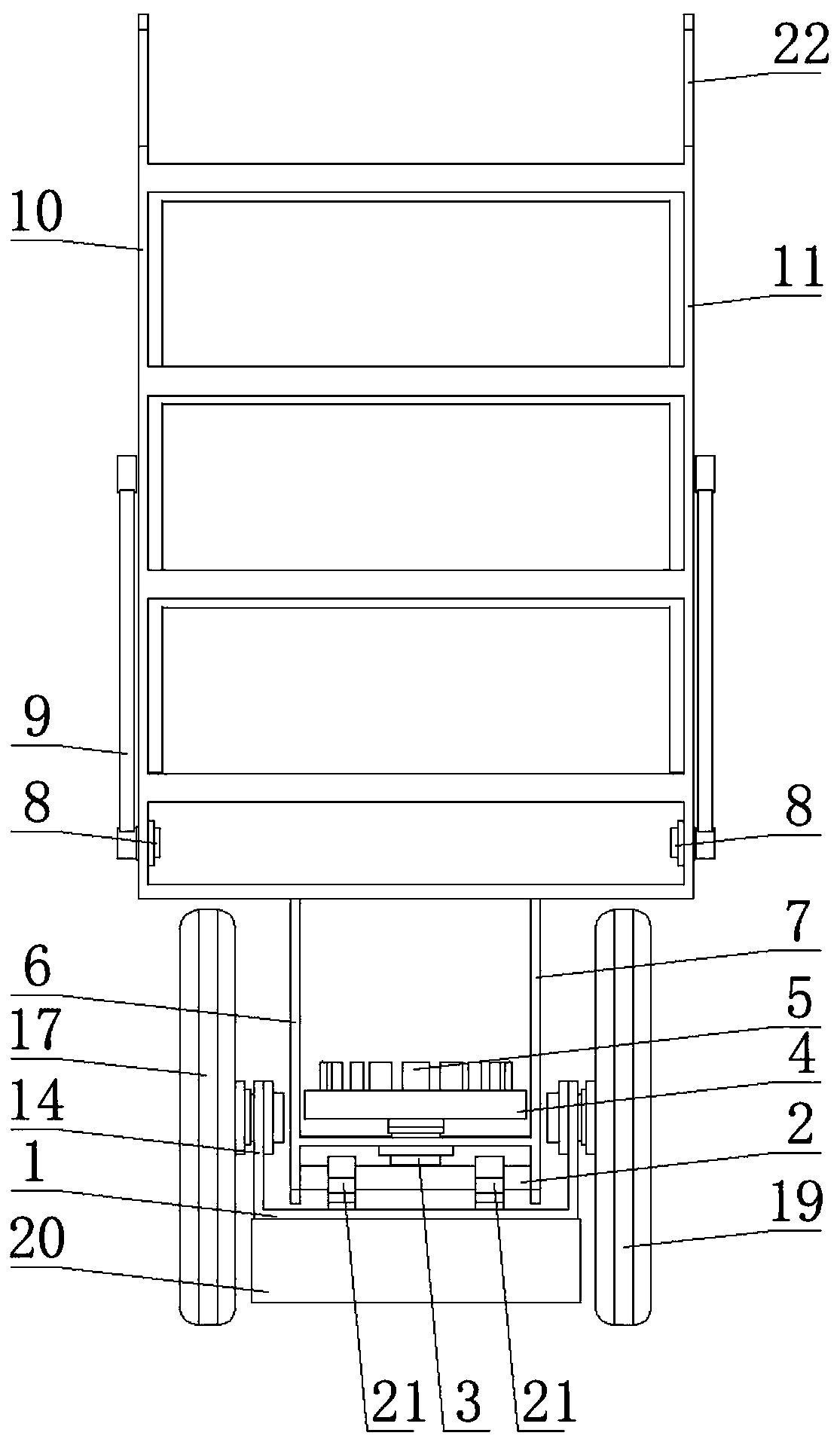
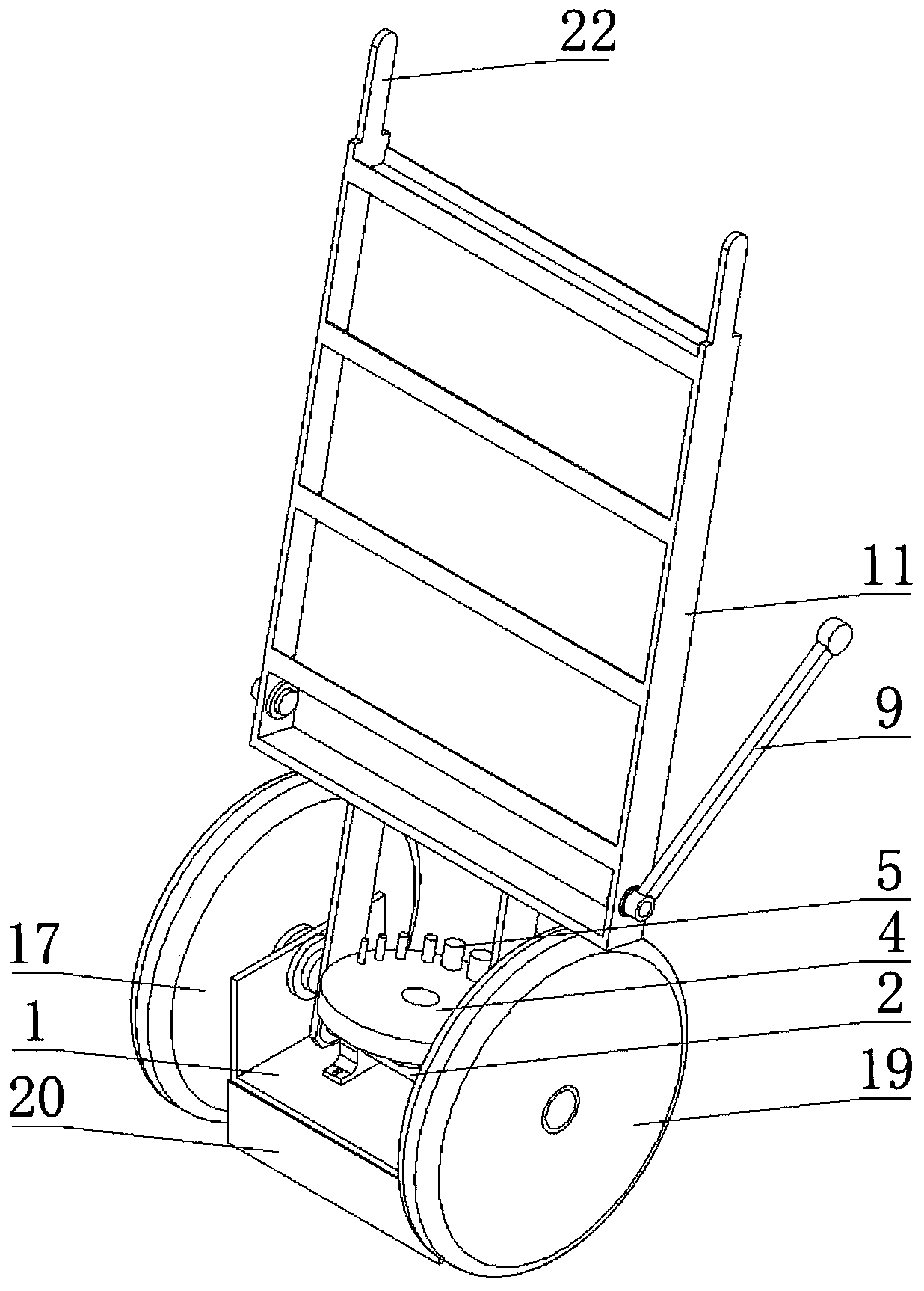
[0043] Such as figure 1 with Figure 5 The shown multifunctional all-terrain transport robot includes a chassis 1 and a wheel assembly. Such as figure 2 As shown, the left part of the chassis 1 is provided with a left mounting seat 14, and the right part of the chassis 1 is provided with a right mounting seat 15, and the wheel assembly includes a third motor 16 installed on the left mounting seat 14, a motor mounted on the third motor 16 The left wheel 17 on the rotating shaft, the fourth motor 18 installed on the right mount 15 and the right wheel 19 located on the rotating shaft of the fourth motor 18, the left wheel 17 and the right wheel 19 are symmetrical and coaxially arranged, through the left The difference of wheel 17 and right wheel 19 rotating speeds can realize the steering of robot. The chassis 1 is provided with a lower electrical box 20 fixed on the chassis 1, the lowest height of the electrical box 20 is higher than the lowest height of the left wheel 17 or...
Embodiment 2
[0066] The structural principle of this embodiment is basically the same as that of Embodiment 1, the difference is that, as Figure 4 As shown, the central axis of the first motor 3 is parallel to the tilting axis 2 . Such as Figure 4 As shown, a vertical bar 24 is arranged between the cross bar 23 and the shelf, and the first motor 3 is fixed on the vertical bar 24 . When the shelf is tilted forward, the first motor 3 drives the center of gravity of the counterweight to rotate behind the tilting axis 2, thereby changing the center of gravity of the upper part of the robot, so that the center of gravity of the upper part of the robot is located directly above the tilting axis 2, maintaining the upper part of the robot balance. When the shelf is tilted backward, the first motor 3 drives the center of gravity of the counterweight to rotate to the front of the tilting axis 2, thereby changing the center of gravity of the upper part of the robot, so that the center of gravity ...
Embodiment 3
[0068] The structural principle of this embodiment is basically the same as that of the first embodiment, except that the gravity center adjustment component is a gyroscope.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More