

Nursing robot path planning method based on CNN and improved A-Star algorithm
A path planning and robotics technology, applied in the field of robotics to increase efficiency, run smoothly, and ease congestion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
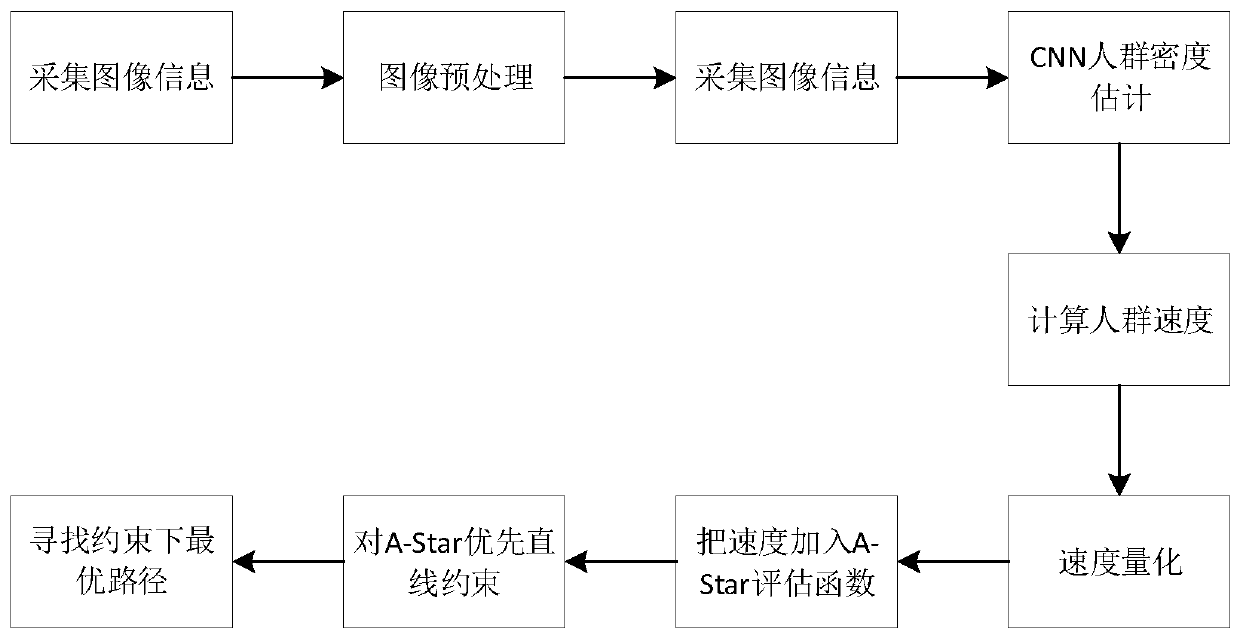
[0046] The present invention proposes a nursing robot path planning method based on CNN and improved A-Star algorithm, which preferentially selects low-density and straight-line paths, avoids congested areas, reduces the number of turns, and ensures the smooth operation of the robot and improves efficiency. like figure 1 is the system flow chart.
[0047] First, the medical staff input the destination to the nursing robot, and the nursing robot sends the starting point and end point of the destination to the hospital server; the server reads the video image information of each path from the customer to the destination; the server preprocesses the image and extracts the features of the image The information is used as the input of training data, and CNN is used to calculate the crowd density.
[0048] When the CNN network is trained, the head o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More