

A Fast Reconstruction Method of Inertial Navigation Reference During Planetary Landing
A benchmark and planetary technology, applied in navigation through speed/acceleration measurement, integrated navigator, instrument, etc., can solve problems that affect the successful implementation of missions, error in calculating height information, lander crashes, etc., and achieve data validity The effect of judging, improving estimation accuracy, and improving convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
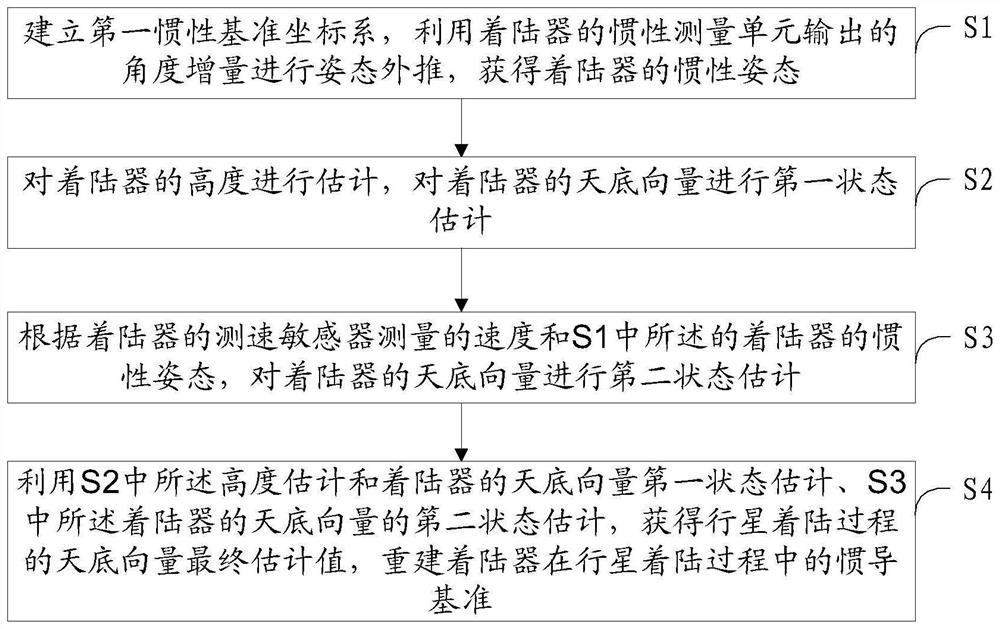
[0046] A fast reconstruction method of inertial navigation reference during planetary landing process, such as figure 1 shown, including the following steps:
[0047] S1. Establish the first inertial reference coordinate system, and use the angle increment output by the inertial measurement unit of the lander to perform attitude extrapolation in the first inertial reference coordinate system to obtain the inertial attitude of the lander.
[0048] The inertial attitude of the lander is:
[0049]
[0050] in
[0051]
[0052] In the formula, q k and q k+1 Respectively represent t k and t k+1 moment pose quaternion, is the quaternion multiplication, Δθ is the angle increment in an attitude update cycle, and δθ is the modulus of Δθ.
[0053] S2. Estimate the height of the lander by using the least squares algorithm, and estimate the first state of the nadir vector of the lander.
[0054] The lander's altitude estimate for:
[0055]
[0056] in
[0057]
[...
Embodiment 2
[0080] The specific calculation process of the rapid reconstruction of the inertial navigation reference during the Mars landing process is as follows:
[0081] 1. Establish the first inertial reference coordinate system, and use the angle increment output by the IMU (ie inertial measurement unit) under the first inertial reference coordinate system to perform attitude extrapolation to obtain the inertial attitude.
[0082]
[0083] where q k and q k+1 Respectively represent t k moment and t k+1 moment pose quaternion, is the attitude quaternion multiplication, q' is the attitude rotation quaternion, given by the following formula:
[0084]
[0085] Among them, Δθ is the angle increment in an attitude update cycle, which is a three-dimensional vector, and δθ is the modulus of Δθ.
[0086] 2. Using the least squares algorithm, the first state estimation and height estimation of the nadir vector of the lander are performed from the distance measurements of multiple b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More