

A steering gear position control method, device and terminal equipment
A control method and steering gear technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem that it is difficult to achieve good control and control effects in the field of robot applications, and achieve the goal of maintaining response followability, strong ease of use and Practicality, the effect of suppressing jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
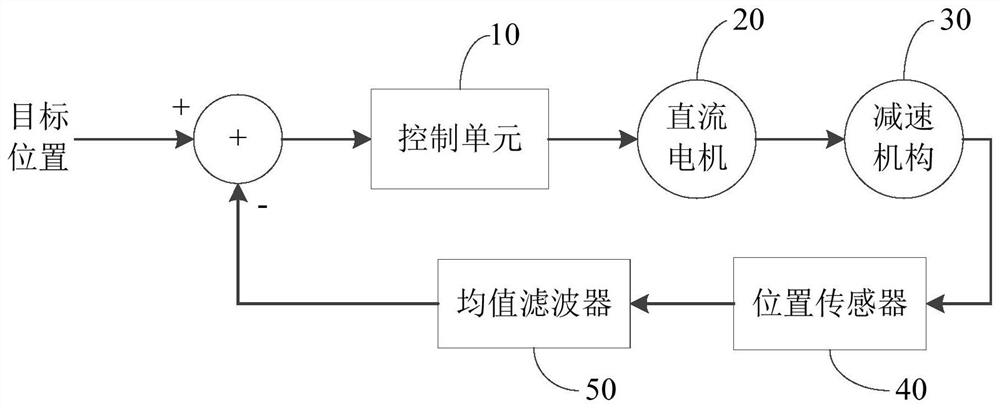
[0043] see figure 1 , is a schematic frame diagram of the application scenario of the steering gear position control method provided by the embodiment of the present invention. For the convenience of description, only the parts related to the embodiment of the present invention are shown. The control of the position of the steering gear is the core function of the steering gear, and the control effect directly affects the performance of the steering gear; the steering gear is used in the field of robotics, and the position control of the steering gear directly affects the effect of the robot's action, including the fluency and stability of the robot's execution . The steering gear position control method is applied to a steering gear position control system, which can control the position of a 180-degree steering gear or a 360-degree steering gear. The control system includes a control unit 10, a DC motor 20, a reduction mechanism 30, and a position sensor 40; on the steering ...
Embodiment 2
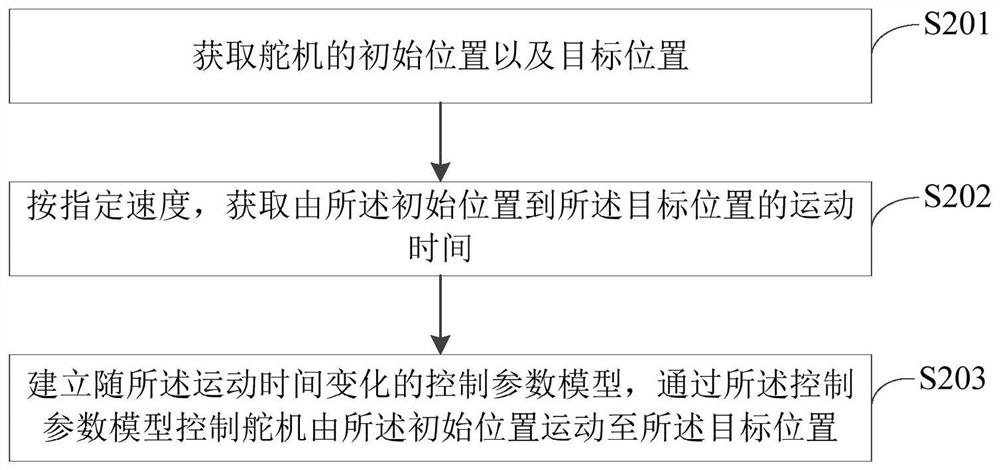
[0046] see figure 2 , is a schematic diagram of the implementation process of the method for controlling the position of the steering gear provided by the embodiment of the present invention. The method is applied to the control of the position of the steering gear of the robot, wherein the steering gear includes a 180-degree steering gear and a 360-degree steering gear, and can also be applied to other fields. Steering gear position stability control. The method includes the following steps:
[0047] Step S201, acquiring the initial position and the target position of the steering gear.
[0048]In this embodiment, the steering gear includes a 180-degree steering gear and a 360-degree steering gear, the 180-degree steering gear can only move between 0 degrees and 180 degrees, and the 360-degree steering gear can rotate continuously. After the steering gear is powered on, the initial position of the steering gear fed back by the position sensor can be obtained. The initial p...
Embodiment 3
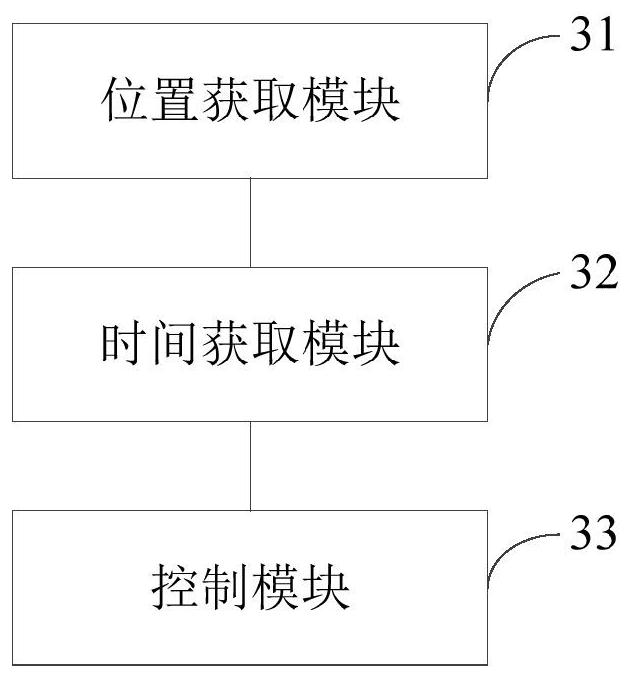
[0077] see image 3 , is a schematic diagram of the steering gear position control device provided by the embodiment of the present invention. For the convenience of description, only the parts related to the embodiment of the present invention are shown.
[0078] The steering gear position control device includes:
[0079] The position acquisition module 31 is used to obtain the initial position and the target position of the steering gear;
[0080] A time acquisition module 32, configured to acquire the movement time from the initial position to the target position at a specified speed;
[0081] The control module 33 is used to establish a control parameter model that changes with the movement time, and control the steering gear to move from the initial position to the target position through the control parameter model, so that the operating state of the steering gear conforms to the preset steering gear performance index.
[0082] In one embodiment, the location acquisi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More