

Coding method and decoding method of point cloud attribute information, storage medium and terminal equipment
A technology of attribute information and encoding method, which is applied in the field of point cloud processing, can solve the problems of large data volume and low encoding efficiency of 3D point cloud attribute information, and achieve the effect of increasing accuracy and improving encoding performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] This embodiment provides a method for encoding point cloud attribute information. The method can be executed by a coding device, and the device can be implemented by software, and applied to an intelligent terminal such as a PC, a server, a cloud, a tablet computer or a personal digital assistant. see figure 1 The encoding method of the point cloud attribute information provided in this embodiment specifically includes:
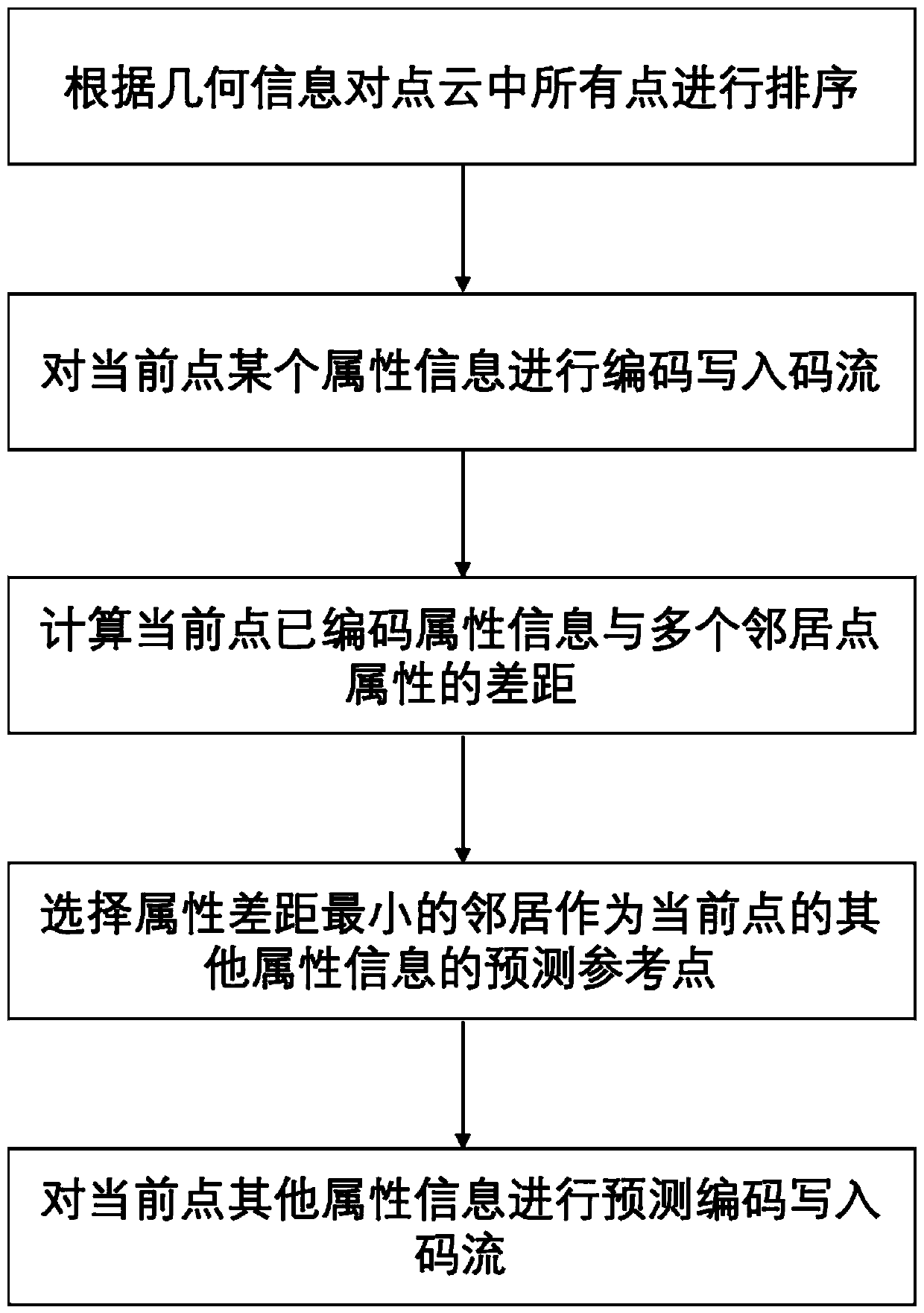
[0050] Step 1: sort all the points in the point cloud according to the geometric information;
[0051] Step 2: Encode a certain attribute information of the current point and write it into the code stream;
[0052] Step 3: Calculate the attribute gap between the encoded attribute information of the current point and the corresponding attribute information of one or more neighbor points;
[0053] Step 4: Select the neighbor with the smallest attribute difference as the prediction reference point of other attribute information of the current point;
...
Embodiment 2
[0079] This embodiment provides a decoding method for point cloud attribute information, which is used to decode the encoding method of point cloud attribute information as described in the above embodiments to obtain a code stream, such as figure 2 As shown, the method includes:
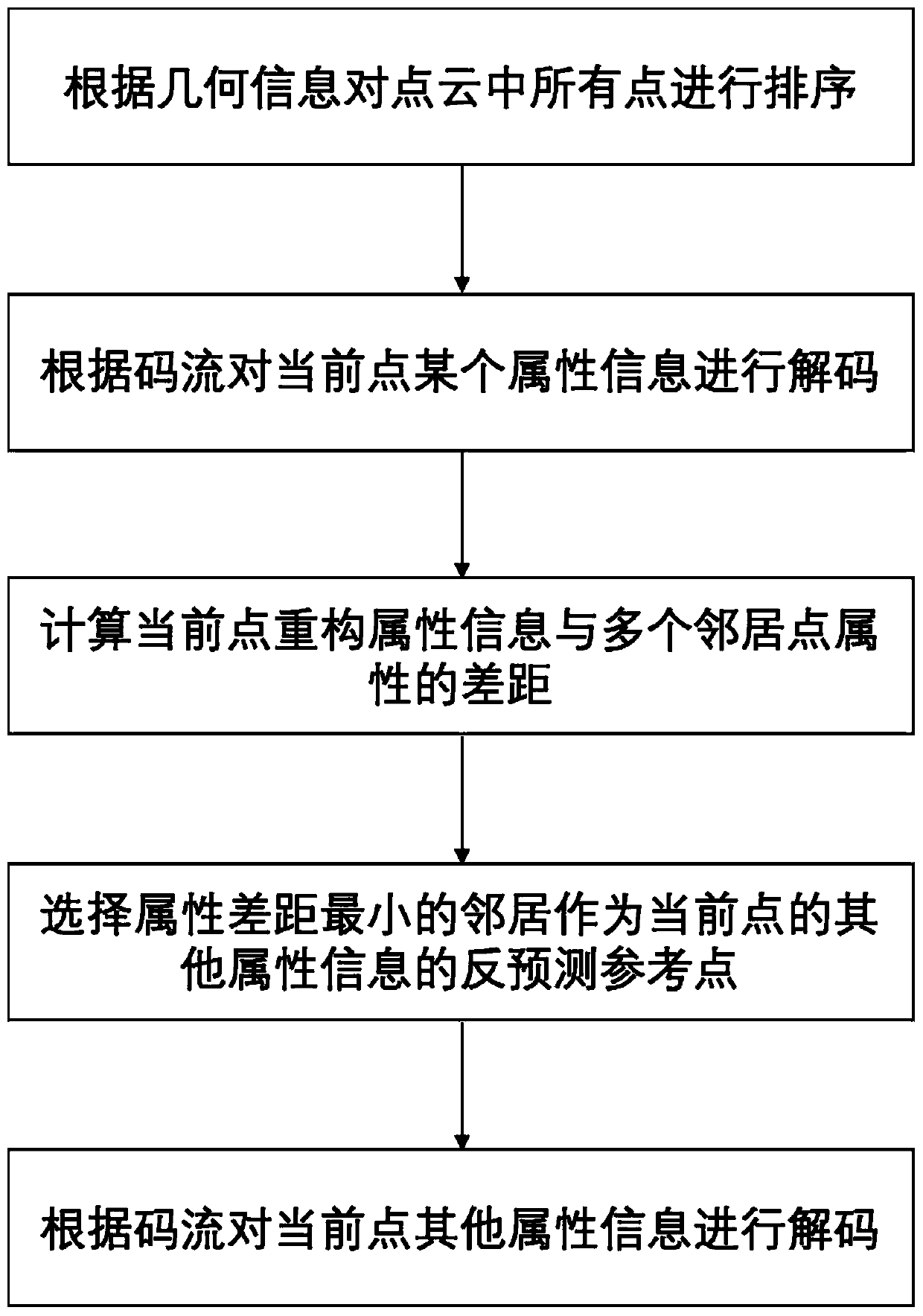
[0080] Step 1: sort all the points in the point cloud according to the geometric information;
[0081] Step 2: Decode a certain attribute information of the current point according to the code stream;
[0082] Step 3: Calculate the attribute gap between the attribute information reconstructed at the current point and the corresponding attribute information of one or more neighbor points;
[0083] Step 4: Select the neighbor with the smallest attribute gap as the reverse prediction reference point of other attribute information of the current point;
[0084] Step 5: Decoding other attribute information of the current point according to the code stream.
[0085] for example:
[0086] Decode a frame...
Embodiment 3
[0096] Based on the encoding method and decoding method of the above-mentioned point cloud attribute information, this embodiment provides a computer-readable storage medium, the computer-readable storage medium stores one or more programs, and the one or more programs can be One or more processors are executed to implement the steps in the encoding method or decoding method of point cloud attribute information as described in the above-mentioned embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More