Multifunctional industrial robot manipulator
A technology of industrial robots and manipulators, applied in the field of manipulators, can solve problems such as broken joints, inconsistent linkage of grippers, and impact on clamping firmness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings.
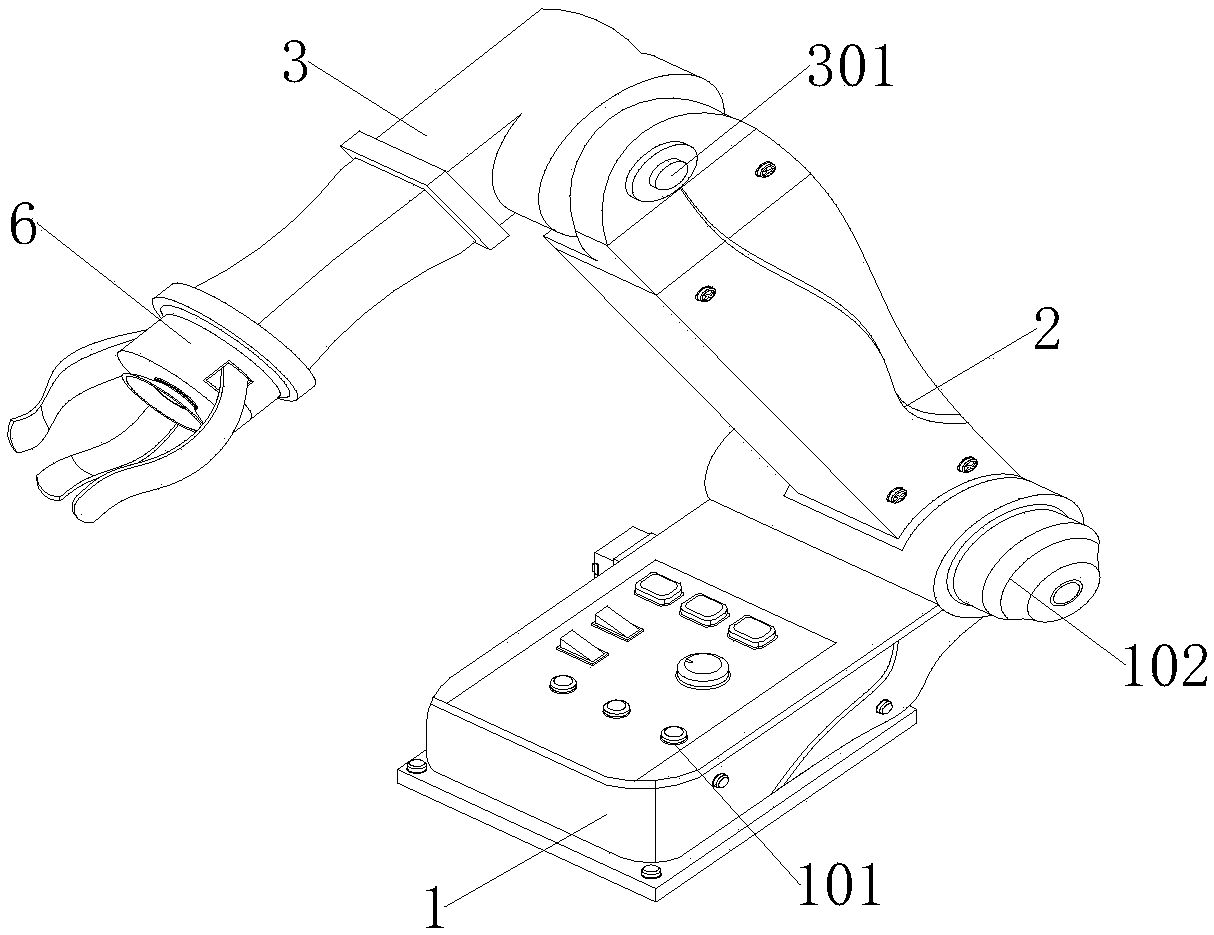
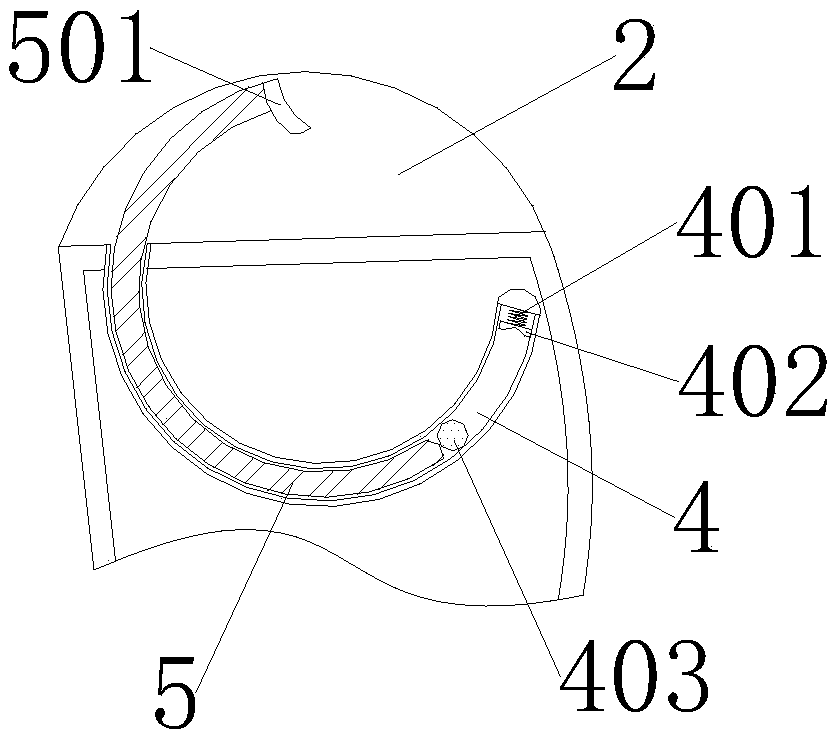
[0020] see Figure 1-2 As shown, a multifunctional industrial robot manipulator, the multifunctional industrial robot manipulator includes a casing 1 and a transmission arm 2, the bottom end of the transmission arm 2 is arranged through the top of the rear side of the casing 1, and the top of the front side of the transmission arm 2 has a movable track 4, and the inner end of the movable track 4 is fixedly connected with a spring 401, the outside of the spring 401 is fixedly connected with a block 402, and the inside of the movable track 4 is rollingly connected with a rolling ball 403, the rolling ball 403 is movably connected with the block 402, and the movable track 4 inside and located outside the rolling ball 403 is slidingly connected with a half-ring block 5, the top of the half-ring block 5 is fixedly connected with a bra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More