Climbing robot with pneumatic control devices
A control device and robot technology, applied in the field of climbing robots, can solve the problems of high labor intensity, large machine volume and high maintenance cost, and achieve the effects of avoiding potential safety hazards, reducing its own weight and having a simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to make the technical means, creative features, objectives and effects of the invention easy to understand, the present invention will be further elaborated below in conjunction with specific illustrations.
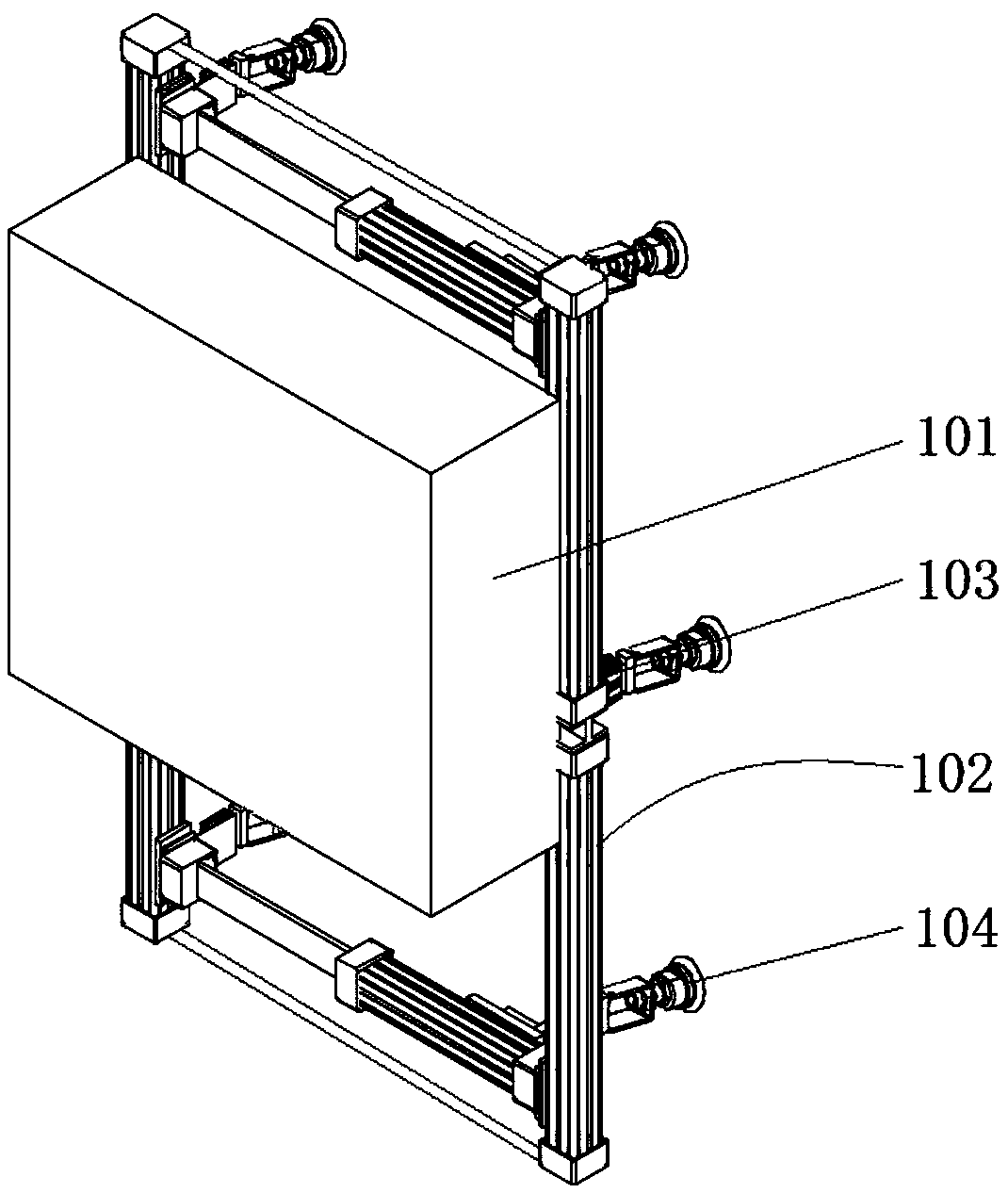
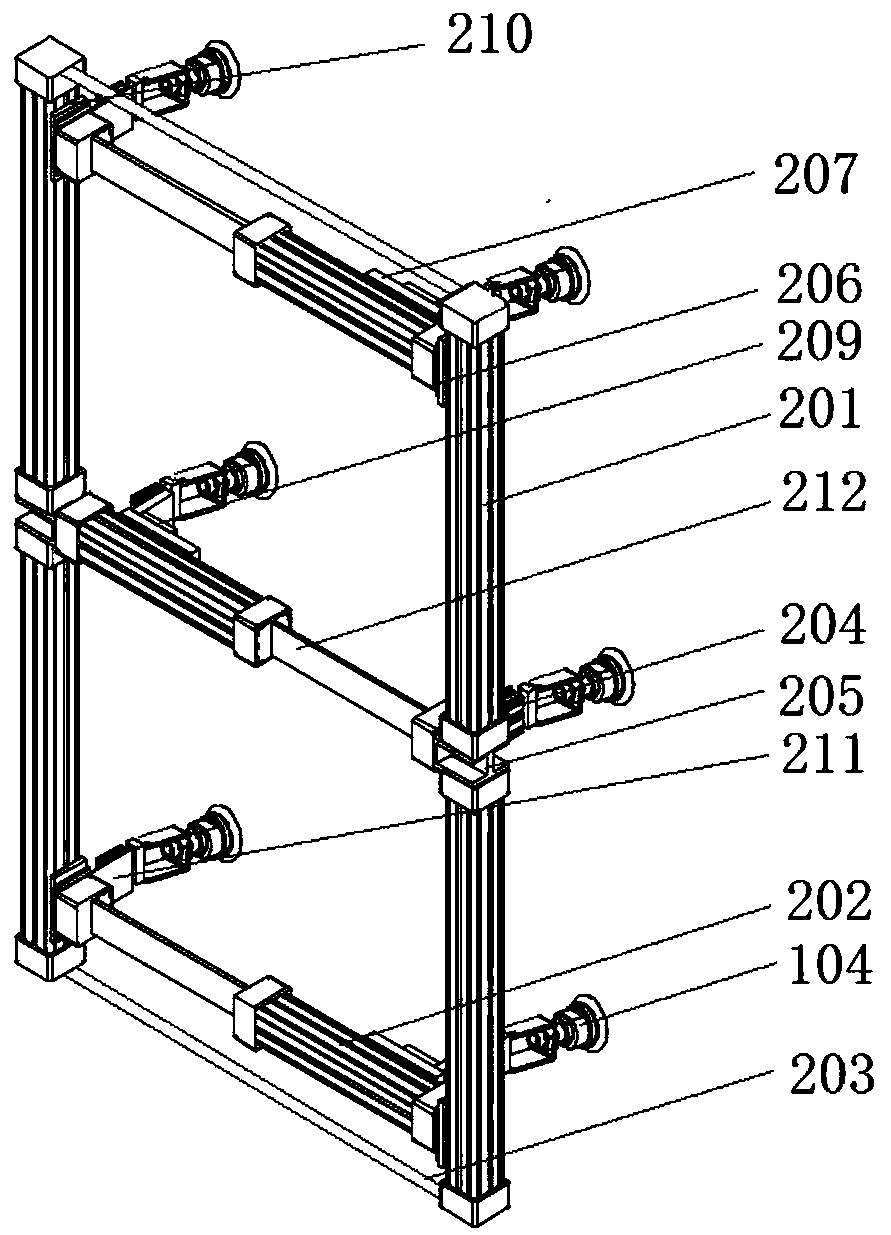
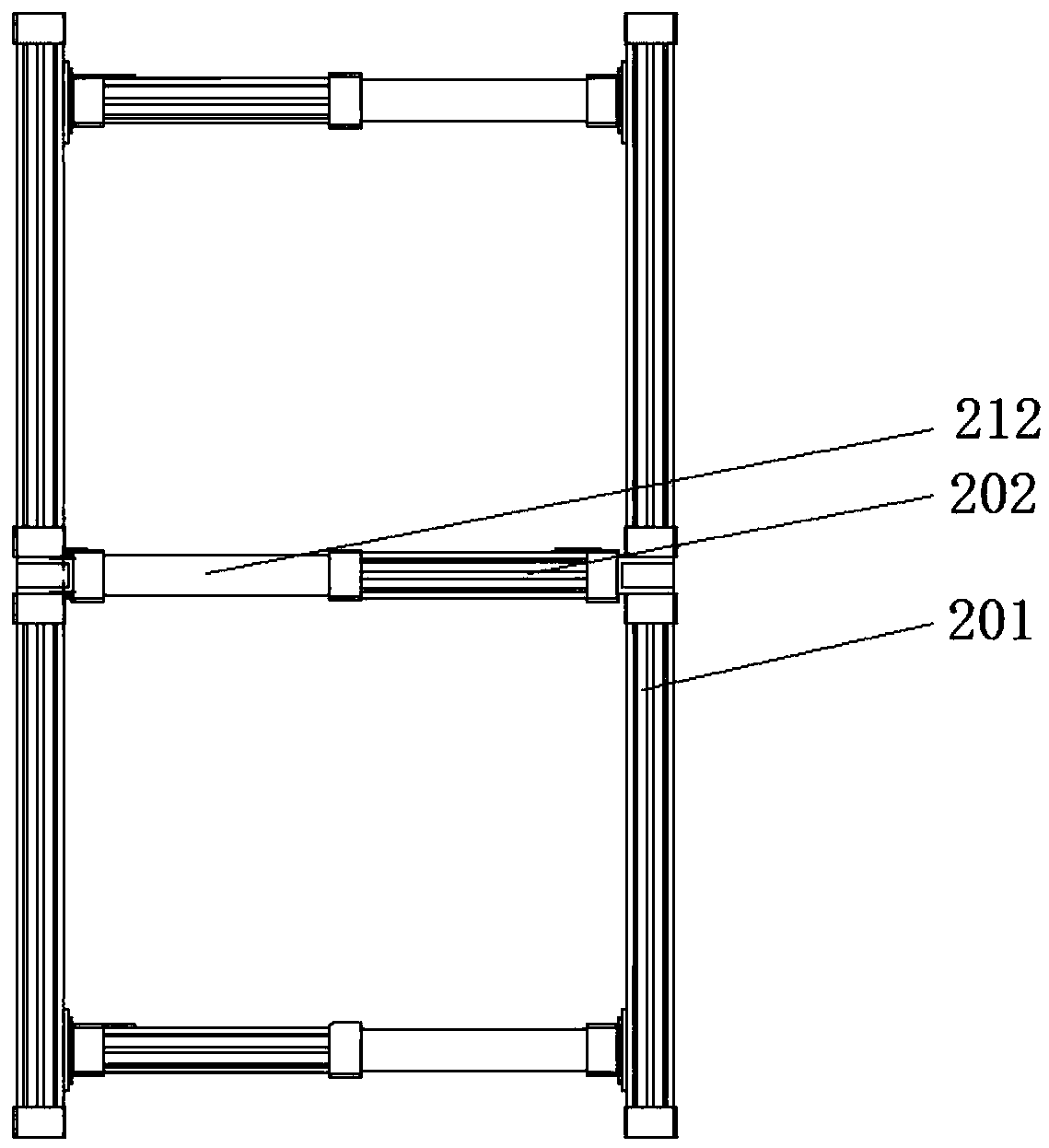
[0022] A preferred embodiment of the present invention is to provide a climbing robot equipped with a pneumatic control device. The purpose is to use the pneumatic control device as a gripping device to adsorb the climbing robot on the wind turbine tower and fix it at the working position to expand its functionality. Work, use the rodless cylinder bionic foot animal crawling principle to move up and down and turn to achieve the purpose of going to any position of the tower or other absorbable objects. The structure is simple, which greatly reduces the weight of the robot itself, making it flexible and convenient to work. The controller is controlled and worked by sending instructions from the control center, and the whole process is fully automated, complet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More